دوره 6، شماره 4 - ( 12-1399 )
جلد 6 شماره 4 صفحات 289-276 |
برگشت به فهرست نسخه ها



![]()
![]()
![]()
Download citation:
BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:



BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:
Bahadori Z, Koohestani M, Sadeghi H. Comparing the Pattern of Lower Limb Joints Coordination in an Optional and Selective Sprint Start of Elite Women Runners. J Sport Biomech 2021; 6 (4) :276-289
URL: http://biomechanics.iauh.ac.ir/article-1-239-fa.html
URL: http://biomechanics.iauh.ac.ir/article-1-239-fa.html
بهادری زهرا، کوهستانی معین، صادقی حیدر. مقایسه الگوی هماهنگی مفاصل اندام تحتانی در استارت دوومیدانی اختیاری و منتخب دوندگان نخبه زن. مجله بیومکانیک ورزشی. 1399; 6 (4) :276-289
زهرا بهادری*1 

 ، معین کوهستانی1 ، حیدر صادقی2
، معین کوهستانی1 ، حیدر صادقی2
، معین کوهستانی1 ، حیدر صادقی2
1- گروه بیومکانیک ورزشی، دانشکده تربیت بدنی و علوم ورزشی، دانشگاه خوارزمی، تهران، ایران.
2- گروه بیومکانیک ورزشی، پژوهشکده علوم حرکتی، دانشگاه خوارزمی، تهران، ایران.
2- گروه بیومکانیک ورزشی، پژوهشکده علوم حرکتی، دانشگاه خوارزمی، تهران، ایران.
واژههای کلیدی: استارت دوومیدانی، الگوی هماهنگی مفاصل، فاز نسبی پیوسته، اندام تحتانی، ورزشکار نخبه
متن کامل [PDF 5164 kb]
(2290 دریافت)
| چکیده (HTML) (4578 مشاهده)

.jpg)
.jpg)
.jpg)
متن کامل: (4080 مشاهده)
مقدمه
دوی سرعت جزء جداییناپذیر بیشتر حرکات ورزشی است [1]. استارت سریع، یک مهارت مهم برای دونده است تا بتواند حداکثر عملکرد را در طول مسابقه داشته باشد. فاز استارت یک مهارت پیچیده است که توسط چند مفصل و در صفحههای حرکتی مختلف نیاز به هماهنگی پیچیده عضلانی دارد تا بتواند به یک نیروی بزرگ رو به جلو در کوتاهترین زمان برسد [2].
کسب شتاب مؤثر در بخش اول مسابقه دوی سرعت تحت تأثیر نحوه قرارگیری دونده روی بلوکها و مکانیک جدا شدن از بلوک در لحظه شنیده شدن صدای تفنگ است [3]. الگوهای کینتیکی و کینماتیکی ورزشکاران نخبه در مرحله فاز استارت و شتاب، در مطالعات اخیر بسیار مورد توجه قرار گرفتهاند [6, 5, 4].
نتایج این مطالعات نشان میدهد که یک جزء ضروری از تکنیک استارت، هندسه و وضعیت بدن هنگام نشستن در وضعیت استارت است، که شامل موقعیت بلوک، وضعیت مرکز جرم و زاویه بدن است. زاویه مطلوب پای جلو و عقب در وضعیت قرارگیری، تعیینکننده اصلی شکل بدن برای رسیدن به سرعتِ افقیِ بیشتر در لحظه جدا شدن است [8 ،7].
در حرکات انسان، درجات آزادی در بدن از طریق هماهنگی عضلات در یک یا چند مفاصل کاهش مییابد و این هماهنگی به تدریج با بلوغ و یادگیری مهارت تغییر میکند [9]. برنشتاین [10] اظهار داشت که به علت تعداد درجات آزادی اضافی بدن انسان، هیچ حرکتی نمیتواند به طور کامل عیناً تکرار شود. در مورد این تغییرپذیری ذاتی در پیشینه تحقیقات بیومکانیک و کنترل حرکت متفاوت بحث شده است. رویکردهای تجزیه و تحلیل حرکتی مرسوم اغلب تغییرپذیری حرکتی درون فرد را نادیده میگیرند و آن را به عنوان یک نویزِ بیولوژیکی در سیستم حرکت انسان قلمداد میکنند. تئوری سیستم دینامیکی تغییرپذیری درون فردی را به عنوان اطلاعات مهمی در مورد پایداری بردار حالت سیستم در نظر میگیرد [12 ،11].
تلسز و دولیتل [3] گزارش دادند که زمان جدایی از بلوکهای استارت، تقریباً 5 درصد کل زمان مسابقه دوی 100 متر را تشکیل می دهد. هرچند، یک استارت خوب، صرفاً به دلیل کاهش زمان جدایی از بلوک به یک مسابقه کمک نمیکند. اگر چه بسیاری از مربیان موافقاند که یک استارت خوب در برنده شدن مسابقات دوی سرعت ضروری است، اما مسئله اینجاست که چه متغیرهای بیومکانیکی در تکنیک استارت نقش دارند و کدامیک از اینها باید اصلاح شود تا شاهد بهبود عملکرد دوندهها باشیم.
با وجود این، اطلاعات دقیق در مورد مرحله استارت و همینطور گامهای اول دویدن میتواند برای مربیان مهم باشد تا با درک بهتری از حرکات در این دو مرحله، آنها را بهبود بخشیده و توسعه دهند. هدف از این مطالعه مقایسه پارامترهای کینماتیکی اندام تحتانی دوندگان نخبه زن در دو نوع استارت متفاوت است. این تجزیه و تحلیل، هماهنگی بین مفصلهای اندام تحتانی را در فاز استارت نشان میدهد.
روششناسی
جامعه آماری این تحقیق بانوان دوومیدانیکار 15 تا 25ساله شهر تهران که بالای دو سال سابقه فعالیت در رشته دوومیدانی داشته و حدود 30 نفر هستند. از درون جامعه آماری 15 نفر با روش نمونهگیری تصادفی در دسترس با سن 3/57±17/93 سال، وزن 5±66/5 کیلوگرم، قد 4/99±166/26 سانتیمتر و رکورد دوی 100 متر 13/88±0/33 ثانیه، به عنوان نمونه آماری در این تحقیق شرکت کردند.
حداقل تعداد نمونه با استفاده از نرمافزار G*POWER و مبتنی بر آزمون تی زوجی دوطرفه با توان آزمون 0/8، آلفای 0/05 و اندازه اثر 0/8 تعداد 15 نفر به دست آمد (پیوست شماره 1).
دوی سرعت جزء جداییناپذیر بیشتر حرکات ورزشی است [1]. استارت سریع، یک مهارت مهم برای دونده است تا بتواند حداکثر عملکرد را در طول مسابقه داشته باشد. فاز استارت یک مهارت پیچیده است که توسط چند مفصل و در صفحههای حرکتی مختلف نیاز به هماهنگی پیچیده عضلانی دارد تا بتواند به یک نیروی بزرگ رو به جلو در کوتاهترین زمان برسد [2].
کسب شتاب مؤثر در بخش اول مسابقه دوی سرعت تحت تأثیر نحوه قرارگیری دونده روی بلوکها و مکانیک جدا شدن از بلوک در لحظه شنیده شدن صدای تفنگ است [3]. الگوهای کینتیکی و کینماتیکی ورزشکاران نخبه در مرحله فاز استارت و شتاب، در مطالعات اخیر بسیار مورد توجه قرار گرفتهاند [6, 5, 4].
نتایج این مطالعات نشان میدهد که یک جزء ضروری از تکنیک استارت، هندسه و وضعیت بدن هنگام نشستن در وضعیت استارت است، که شامل موقعیت بلوک، وضعیت مرکز جرم و زاویه بدن است. زاویه مطلوب پای جلو و عقب در وضعیت قرارگیری، تعیینکننده اصلی شکل بدن برای رسیدن به سرعتِ افقیِ بیشتر در لحظه جدا شدن است [8 ،7].
در حرکات انسان، درجات آزادی در بدن از طریق هماهنگی عضلات در یک یا چند مفاصل کاهش مییابد و این هماهنگی به تدریج با بلوغ و یادگیری مهارت تغییر میکند [9]. برنشتاین [10] اظهار داشت که به علت تعداد درجات آزادی اضافی بدن انسان، هیچ حرکتی نمیتواند به طور کامل عیناً تکرار شود. در مورد این تغییرپذیری ذاتی در پیشینه تحقیقات بیومکانیک و کنترل حرکت متفاوت بحث شده است. رویکردهای تجزیه و تحلیل حرکتی مرسوم اغلب تغییرپذیری حرکتی درون فرد را نادیده میگیرند و آن را به عنوان یک نویزِ بیولوژیکی در سیستم حرکت انسان قلمداد میکنند. تئوری سیستم دینامیکی تغییرپذیری درون فردی را به عنوان اطلاعات مهمی در مورد پایداری بردار حالت سیستم در نظر میگیرد [12 ،11].
تلسز و دولیتل [3] گزارش دادند که زمان جدایی از بلوکهای استارت، تقریباً 5 درصد کل زمان مسابقه دوی 100 متر را تشکیل می دهد. هرچند، یک استارت خوب، صرفاً به دلیل کاهش زمان جدایی از بلوک به یک مسابقه کمک نمیکند. اگر چه بسیاری از مربیان موافقاند که یک استارت خوب در برنده شدن مسابقات دوی سرعت ضروری است، اما مسئله اینجاست که چه متغیرهای بیومکانیکی در تکنیک استارت نقش دارند و کدامیک از اینها باید اصلاح شود تا شاهد بهبود عملکرد دوندهها باشیم.
با وجود این، اطلاعات دقیق در مورد مرحله استارت و همینطور گامهای اول دویدن میتواند برای مربیان مهم باشد تا با درک بهتری از حرکات در این دو مرحله، آنها را بهبود بخشیده و توسعه دهند. هدف از این مطالعه مقایسه پارامترهای کینماتیکی اندام تحتانی دوندگان نخبه زن در دو نوع استارت متفاوت است. این تجزیه و تحلیل، هماهنگی بین مفصلهای اندام تحتانی را در فاز استارت نشان میدهد.
روششناسی
جامعه آماری این تحقیق بانوان دوومیدانیکار 15 تا 25ساله شهر تهران که بالای دو سال سابقه فعالیت در رشته دوومیدانی داشته و حدود 30 نفر هستند. از درون جامعه آماری 15 نفر با روش نمونهگیری تصادفی در دسترس با سن 3/57±17/93 سال، وزن 5±66/5 کیلوگرم، قد 4/99±166/26 سانتیمتر و رکورد دوی 100 متر 13/88±0/33 ثانیه، به عنوان نمونه آماری در این تحقیق شرکت کردند.
حداقل تعداد نمونه با استفاده از نرمافزار G*POWER و مبتنی بر آزمون تی زوجی دوطرفه با توان آزمون 0/8، آلفای 0/05 و اندازه اثر 0/8 تعداد 15 نفر به دست آمد (پیوست شماره 1).

برای اندازهگیری متغیرهای کینماتیکی در مهارت استارت از دستگاه Noraxon-MyoMotion ساخت کشور آمریکا استفاده شد. سیستم تجزیه و تحلیلMyoMotion شامل مجموعهای از سنسورها (یک تا شانزده) است که با استفاده از فناوری سنسور اینرسی عمل میکند [13].
دادههای جمعآوری شده توسط دستگاه MyoMotion نیز به طور خودکار به وسیله خود دستگاه فیلتر میشوند [14]. پس از شرح کامل آزمون فرم رضایتنامه و اطلاعات فردی در اختیار آزمودنیها قرار گرفت. سپس سنسورها روی پا، ساق، ران و استخوان خاجی و پشت برای اندازهگیری زوایای مفاصل اندام تحتانی چسبانده شد [15]. فرکانس دستگاه برای ضبط حرکات روی 200 هرتز تنظیم شد.
هر آزمودنی به مدت ده دقیقه به گرم کردن پرداخت و پس از قرار دادن سنسورها، هریک استارت مخصوص به خود را که در مسابقات انجام میدهد، سهبار به فاصله هر دو دقیقه انجام داد. سپس هر آزمودنی استارت بلند را به شیوهای که در زیر شرح داده میشود، پنجبار به فاصله هر دو دقیقه انجام داد.
فاصله بلوک جلو تا عقب 45 درصد طول پا و فاصله بین بلوک جلو تا خط شروع 60 درصد طول پا (فاصله بین تروکانتر بزرگ تا قوزک خارجی به عنوان طول پا در نظر گرفته شد)، زاویه دستها با زمین 90 درجه (به طوری که در حالت عادی قسمت قدامی شانه کاملاً بالای انگشت شست قرار گیرد و یا در وضعیت خم زیر بغل خلفی کاملاً در بالای انگشت شست قرار بگیرد) و همچنین زاویه زانوی پای جلو 100 درجه، انحراف بلوک جلو 30 درجه و بلوک عقب 70 درجه تنظیم شد. این استارت مدلی برای به حداکثر رساندن سرعت است که اسکات و کنوتزن [8] و هارلند و استیل [16] آن را پیشنهاد دادند.
برای به دست آوردن هماهنگی در ادبیات پژوهشی از روشهای مختلفی همچون وکتورکدینگ، فاز نسبی گسسته و فاز نسبی پیوسته استفاده شده است. علیرغم اینکه سرعت حرکت، عامل مهمی در تجزیه و تحلیل مکانیک حرکت است، تنها در روش فاز نسبی پیوسته از سرعت اندامها و مفاصل برای محاسبات استفاده میشود. این در حالی است که در دو روش دیگر فقط از جابهجایی برای به دست آوردن هماهنگی استفاده شده است.
به دلیل اهمیت سرعت حرکت در مهارت استارت، در تحقیق حاضر از روش فاز نسبی پیوسته استفاده شد [17، 18، 19] که در این روش بعد از به دست آوردن مکان زاویهای نرمالشده و سرعت زاویهای نرمالشده، زاویه فازی به دست میآید (فرمولهای شماره 1، 2، 3).



در روابط بالا øø زاویهی فازی مفصل است. در رابطه سه با توجه به قرارگیری øø در هر ربع مثلثاتی محاسبات زیر روی زاویه فازی انجام میشود [20]. برای به دست آوردن فاز نسبی پیوسته زاویه فازی مفاصل تحتانی از زاویه فازی مفاصل فوقانی کم شد (فرمول شماره 4).

تمامی مراحل مذکور برای اندام یا مفصلی که با اندام یا مفصل مورد نظر حرکات جفتی دارد، عیناً تکرار میشود.
برای آنالیز دادهها در مهارت استارت، تمامی دادههای هماهنگی به 100 درصد (از اولین حرکت آزمودنی تا گام اول بعد از خط استارت نرمال شد [21، 22، 23]. فاز نسبی پیوسته مفاصل ران و زانو، ران و مچپا، زانو و مچپا در طول حرکت استارت محاسبه شد [17، 18، 19].
رایجترین مقادیری که از دادههای CRP مشتق میشود، شامل میانگین طی یک دوره مجزا از سیکل است که زوایا طی هر 10 درصد سیکل میانگینگیری میشوند [12]. دادههای نرمالشده در این تحقیق نیز در طول هر 10 درصد از سیکل میانگینگیری شدند.
برای تحلیل آماری، از آمار توصیفی میانگین و انحراف استاندارد برای توصیف دادهها و آزمون شاپیرو ویلک برای بررسی طبیعی بودن توزیع دادهها استفاده شد. برای مقایسه دادههای جمعآوری شده در صورت نرمال بودن دادهها از آزمون تی وابسته و در صورت نرمال نبودن از آزمون ناپارامتریک ویلکاکسون در سطح معناداری 0/05 استفاده شد.
نتایج
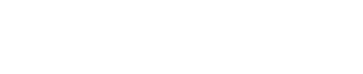
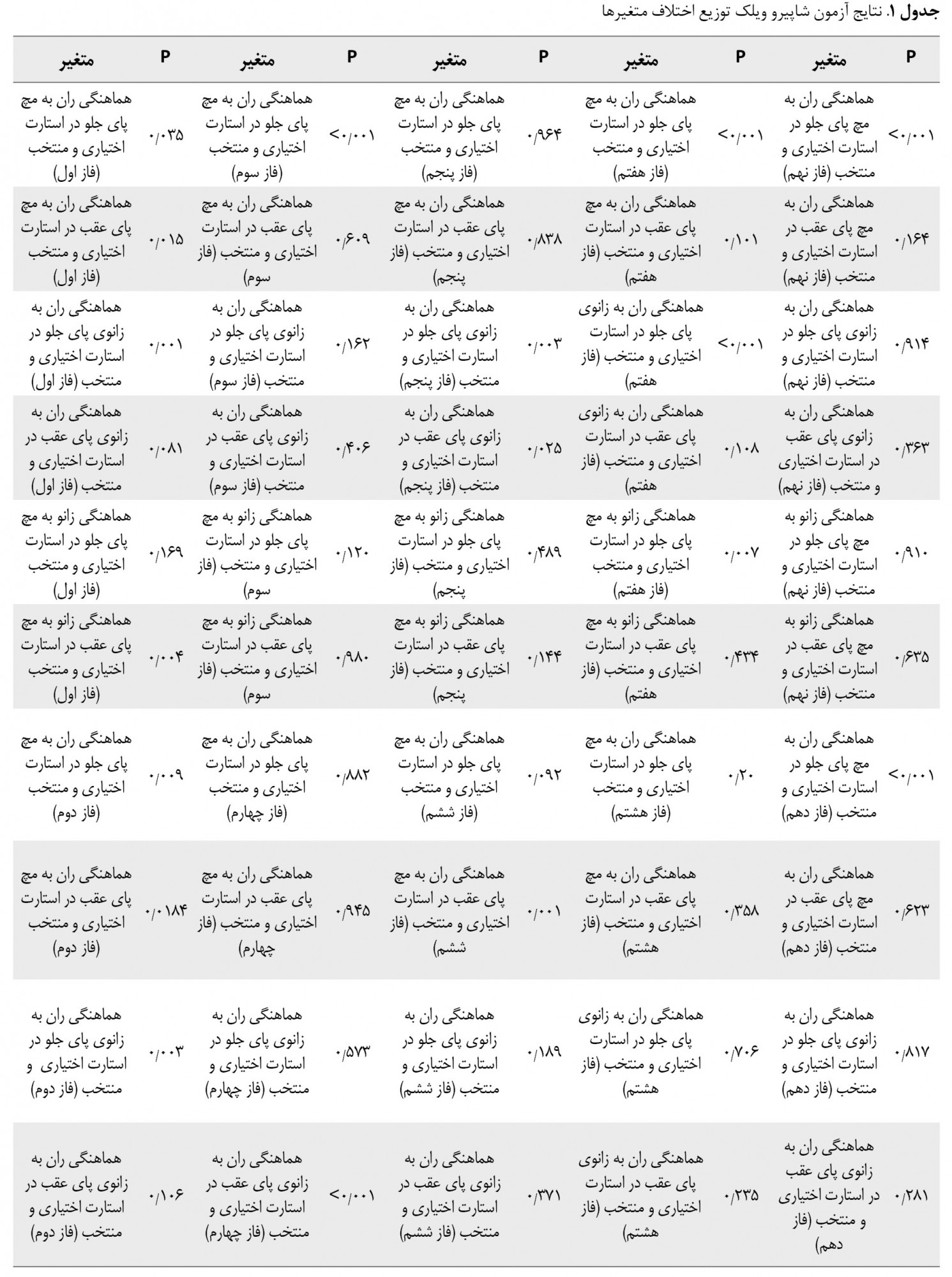
در مواردی که آزمون شاپیرو ویلک توزیع طبیعی دادهها را نشان داد (0/05<P) از آزمون تی وابسته و در سایر موارد از آزمون ویلکاکسون استفاده شد (جدول شماره 1).

الگوی هماهنگی اندام تحتانی در آزمودنیها محاسبه و در نمودارها به صورت صدتایی رسم شد. سپس برای انجام محاسبات آماری در هر 10 درصد سیکل میانگینگیری شد و قسمتهایی که اختلاف بین دو استارت معنادار شده با علامت در داخل نمودار مشخص شده است.
نتایج آزمون تی وابسته و ویلکاکسون در الگوی هماهنگی زانو به مچپای عقب، فاز اول= (0/021=P) و فاز دوم= (0/03=P)، الگوی هماهنگی ران به زانوی جلو، فاز دوم= (0/025=P)، فاز سوم= (0/041=P)، فاز چهارم= (0/018=P)، فاز پنجم= (0/01=P)، الگوی هماهنگی ران به زانو عقب، فاز اول= (0/035=P)، فاز دوم= (0/012=P) و فاز سوم= (0/008=P)، الگوی هماهنگی ران به مچپای جلو، فاز نهم= (0/018=P)، الگوی هماهنگی ران به مچپای عقب، فاز اول= (0/01=P)، فاز دوم= (0/002=P) و فاز هفتم= (0/00006=P) اختلاف معناداری را نشان داد و در بقیه موارد اختلاف معناداری مشاهده نشد.
همانطور که در تصویرهای شماره 1، 2 و 3 مشاهده میکنید، عموماً در فازهای ابتدایی بین دو نوع استارت تفاوت وجود دارد و از فاز چهارم به بعد اختلافی بین نمودارها مشاهده نمیشود و الگوی دو مفصل در دو نوع استارت شبیه به هم است.
دادههای جمعآوری شده توسط دستگاه MyoMotion نیز به طور خودکار به وسیله خود دستگاه فیلتر میشوند [14]. پس از شرح کامل آزمون فرم رضایتنامه و اطلاعات فردی در اختیار آزمودنیها قرار گرفت. سپس سنسورها روی پا، ساق، ران و استخوان خاجی و پشت برای اندازهگیری زوایای مفاصل اندام تحتانی چسبانده شد [15]. فرکانس دستگاه برای ضبط حرکات روی 200 هرتز تنظیم شد.
هر آزمودنی به مدت ده دقیقه به گرم کردن پرداخت و پس از قرار دادن سنسورها، هریک استارت مخصوص به خود را که در مسابقات انجام میدهد، سهبار به فاصله هر دو دقیقه انجام داد. سپس هر آزمودنی استارت بلند را به شیوهای که در زیر شرح داده میشود، پنجبار به فاصله هر دو دقیقه انجام داد.
فاصله بلوک جلو تا عقب 45 درصد طول پا و فاصله بین بلوک جلو تا خط شروع 60 درصد طول پا (فاصله بین تروکانتر بزرگ تا قوزک خارجی به عنوان طول پا در نظر گرفته شد)، زاویه دستها با زمین 90 درجه (به طوری که در حالت عادی قسمت قدامی شانه کاملاً بالای انگشت شست قرار گیرد و یا در وضعیت خم زیر بغل خلفی کاملاً در بالای انگشت شست قرار بگیرد) و همچنین زاویه زانوی پای جلو 100 درجه، انحراف بلوک جلو 30 درجه و بلوک عقب 70 درجه تنظیم شد. این استارت مدلی برای به حداکثر رساندن سرعت است که اسکات و کنوتزن [8] و هارلند و استیل [16] آن را پیشنهاد دادند.
برای به دست آوردن هماهنگی در ادبیات پژوهشی از روشهای مختلفی همچون وکتورکدینگ، فاز نسبی گسسته و فاز نسبی پیوسته استفاده شده است. علیرغم اینکه سرعت حرکت، عامل مهمی در تجزیه و تحلیل مکانیک حرکت است، تنها در روش فاز نسبی پیوسته از سرعت اندامها و مفاصل برای محاسبات استفاده میشود. این در حالی است که در دو روش دیگر فقط از جابهجایی برای به دست آوردن هماهنگی استفاده شده است.
به دلیل اهمیت سرعت حرکت در مهارت استارت، در تحقیق حاضر از روش فاز نسبی پیوسته استفاده شد [17، 18، 19] که در این روش بعد از به دست آوردن مکان زاویهای نرمالشده و سرعت زاویهای نرمالشده، زاویه فازی به دست میآید (فرمولهای شماره 1، 2، 3).



در روابط بالا øø زاویهی فازی مفصل است. در رابطه سه با توجه به قرارگیری øø در هر ربع مثلثاتی محاسبات زیر روی زاویه فازی انجام میشود [20]. برای به دست آوردن فاز نسبی پیوسته زاویه فازی مفاصل تحتانی از زاویه فازی مفاصل فوقانی کم شد (فرمول شماره 4).

تمامی مراحل مذکور برای اندام یا مفصلی که با اندام یا مفصل مورد نظر حرکات جفتی دارد، عیناً تکرار میشود.
برای آنالیز دادهها در مهارت استارت، تمامی دادههای هماهنگی به 100 درصد (از اولین حرکت آزمودنی تا گام اول بعد از خط استارت نرمال شد [21، 22، 23]. فاز نسبی پیوسته مفاصل ران و زانو، ران و مچپا، زانو و مچپا در طول حرکت استارت محاسبه شد [17، 18، 19].
رایجترین مقادیری که از دادههای CRP مشتق میشود، شامل میانگین طی یک دوره مجزا از سیکل است که زوایا طی هر 10 درصد سیکل میانگینگیری میشوند [12]. دادههای نرمالشده در این تحقیق نیز در طول هر 10 درصد از سیکل میانگینگیری شدند.
برای تحلیل آماری، از آمار توصیفی میانگین و انحراف استاندارد برای توصیف دادهها و آزمون شاپیرو ویلک برای بررسی طبیعی بودن توزیع دادهها استفاده شد. برای مقایسه دادههای جمعآوری شده در صورت نرمال بودن دادهها از آزمون تی وابسته و در صورت نرمال نبودن از آزمون ناپارامتریک ویلکاکسون در سطح معناداری 0/05 استفاده شد.
نتایج
در مواردی که آزمون شاپیرو ویلک توزیع طبیعی دادهها را نشان داد (0/05<P) از آزمون تی وابسته و در سایر موارد از آزمون ویلکاکسون استفاده شد (جدول شماره 1).

الگوی هماهنگی اندام تحتانی در آزمودنیها محاسبه و در نمودارها به صورت صدتایی رسم شد. سپس برای انجام محاسبات آماری در هر 10 درصد سیکل میانگینگیری شد و قسمتهایی که اختلاف بین دو استارت معنادار شده با علامت در داخل نمودار مشخص شده است.
نتایج آزمون تی وابسته و ویلکاکسون در الگوی هماهنگی زانو به مچپای عقب، فاز اول= (0/021=P) و فاز دوم= (0/03=P)، الگوی هماهنگی ران به زانوی جلو، فاز دوم= (0/025=P)، فاز سوم= (0/041=P)، فاز چهارم= (0/018=P)، فاز پنجم= (0/01=P)، الگوی هماهنگی ران به زانو عقب، فاز اول= (0/035=P)، فاز دوم= (0/012=P) و فاز سوم= (0/008=P)، الگوی هماهنگی ران به مچپای جلو، فاز نهم= (0/018=P)، الگوی هماهنگی ران به مچپای عقب، فاز اول= (0/01=P)، فاز دوم= (0/002=P) و فاز هفتم= (0/00006=P) اختلاف معناداری را نشان داد و در بقیه موارد اختلاف معناداری مشاهده نشد.
همانطور که در تصویرهای شماره 1، 2 و 3 مشاهده میکنید، عموماً در فازهای ابتدایی بین دو نوع استارت تفاوت وجود دارد و از فاز چهارم به بعد اختلافی بین نمودارها مشاهده نمیشود و الگوی دو مفصل در دو نوع استارت شبیه به هم است.
.jpg)
.jpg)
.jpg)
بحث
مطالعه حاضر نشان داد که الگوی هماهنگی اندام تحتانی در فازهای ابتدایی بین دو نوع استارت تفاوت معناداری داشت، اما از فاز چهارم به بعد الگوی دو مفصل مشابه بود. به طور کلی در نمودارهای هماهنگی، زمانی که CRP برابر با صفر درجه است، حرکت دو نوسانگر همفاز است؛ یعنی دو نوسانگر حرکتی در یک جهت را انجام میدهند و زاویه CRP برابر با 180 درجه نوسان کاملاً ناهمفاز دو نوسانگر را نشان میدهد، دو نوسانگر حرکتی کاملا مخالف هم به نمایش گذاشتهاند.
هر زاویه CRP بین صفر تا 180 درجه نشاندهنده نوسانات غیرهمفاز است که میتواند تمایل به همفازی و یا ناهمفازی داشته باشد. مقادیر CRP مثبت نشان میدهد که اندام دیستال در فضای فازی پیش گرفته و CRP منفی نشاندهنده پیش گرفتن اندام پروگزیمال است. همچنین شیب منحنی سریعتر بودن حرکت اندامها در طول هر دوره را نشان میدهد، که شیب مثبت نشاندهنده حرکت سریعتر اندام دیستال و شیب منفی نشاندهنده حرکت سریعتر اندام پروگزیمال است [12 ،11].
هماهنگی زانو به مچ پای جلو: در ابتدای حرکت و در فاز اول حرکت در استارت منتخب زانو و مچ پا هماهنگی غیرهمفازی را از خود نشان میدهند، به صورتی که زانو در حال اکستنشن و مچپا در حال دورسی فلکشن بوده، که در حال حرکت به سمت همفازی است. این حرکت به سمت همفازی تا فاز دوم ادامه پیدا میکند و بعد از آن دوباره به سمت ناهمفازی میرود، در صورتی که در استارت اختیاری حرکت در فاز اول و دوم حالت یکنواختی دارد و از فاز دوم به بعد به سمت همفازی و سپس ناهمفازی میرود.
در استارت منتخب، در ابتدای حرکت زانو حرکت سریعتری نسبت به مچ پا در فضای فازی دارد و از فاز دوم به بعد حرکت مچ پا سریعتر میشود، در حالی که این حرکت دو مفصل تا فاز دوم در استارت اختیاری یکنواحت است و بعد از فاز دوم همانند استارت منتخب مچ پا حرکت سریعتری در صفحه فازی دارد، از فاز سوم به بعد هر دو اندام حرکت مشابهی را نشان میدهند. هماهنگی زانو به مچ پای عقب: در این هماهنگی هر دو پا علیرغم تفاوت در زاویه و فاصله بلوکها هماهنگی مشابهی را نشان میدهند.
هماهنگی ران به زانوی جلو: در استارت منتخب دو مفصل ران و زانو حرکت را در حال ناهمفازی بیشتری نسبت به استارت اختیاری آغاز کرده که در فاز دوم این ناهمفازی ادامه پیدا کند، در واقع با بیشتر شدن اکستنشن در زانو ران به اکستنش بیشتری میرود و از فاز دوم به بعد هر دو مفصل در دو استارت رویه مشابهی را پیش گرفته و به سمت همفازی پیش میروند و از فاز چهار به بعد دو نمودار بر هم منطبق شدند.
هماهنگی ران به زانوی عقب: در فاز اول هر دو اندام از یک حالت همفازی حرکت را آغاز کردهاند که در استارت اختیاری این همفازی تا فاز پنجم ادامه پیدا میکند، در صورتی که در استارت منتخب این همفازی به سمت ناهمفازی پیش رفته و بعد از فاز چهارم مجدد به سمت همفازی پیش رفته و سپس دو نمودار بر هم منطبق شدهاند.
هماهنگی ران به مچ پای جلو: در استارت اختیاری حرکت به صورت ناهمفاز آغاز شده به این صورت که با دورسی فلکشن مچپا ران به اکستنشن میرود، در ادامه با افزایش سرعت اکستنش ران در صفحه فازی هر دو مفصل به سمت همفازی پیش میروند، در حالی که در استارت اختیاری حرکت از همفازی دو مفصل آغاز شده که از فاز دوم به سمت ناهمفازی و دوباره به سمت هم فازی میرود.
دو نمودار از فاز چهارم به بعد با هم منطبق میشوند. از فاز شش تا هفت استارت اختیاری، یکنواختی در حرکت مشاهده میشود، در حالی که استارت منتخب به سمت ناهمفازی بیشتر پیش رفته است. هماهنگی ران به مچپای عقب: در دو نمودار استارت اختیاری و منتخب تفاوت چندانی دیده نمیشود و دو نمودار بر هم منطبق هستند.
اسکات بیان داشت که استارت کوتاه، سرعت بالاتر و استارت بلند باعث جلو راندن بیشتر فرد میشود، همچنین آنالیز دویدن افراد نشان میدهد که استارت بلند با طول گام بیشتر و سرعت بالا همراه است که میتواند شروع مناسبی برای دویدن فرد باشد [8]. با توجه به اینکه استارت منتخب در این تحقیق استارت بلند بود، این نکته را میتوان مشاهده کرد که تفاوت در دو نوع استارت در این تحقیق میتواند ناشی از ترجیح دوندگان به استفاده از استارت کوتاه باشد.
پیشنهاد شده است که متغیرهای کینماتیکی مانند زاویه زانو، مچ پا و زاویه چرخش شانه از اهمیت کلیدی در دوی سرعت برخوردار هستند و تأثیر روشنی بر عملکرد استارت دوی سرعت دارند [24]. در مقابل برخی محققان روابط قابل ملاحظهای بین زوایای زانو، لگن و مفصل مچ پا و عملکرد استارت در دوی سرعت پیدا نکردند [25].
محققان مطرح کردند که قویترین و سریعترین دوندگان سرعت بیشتری هنگام ترک تخته استارت دارند که ناشی از زاویه حاد مفاصل اندام تحتانی در حالت قرارگیری روی تخته استارت است که اجازه میدهد دامنه بزرگتری از اکستنشن مفاصل را داشته باشیم [26].
با توجه به اینکه در این تحقیق در استارت نوع منتخب زاویه 100 درجه را در زانوی عقب داشتیم و این باعث کاهش زاویه ران در هر دو پا به دلیل نحوه قرارگیری میشد. تفاوت تنها در 40 درصد ابتدا مشاهده شد که میتواند ناشی از همین موضوع باشد. هانتر و همکاران [27] بیان کردند که یک شروع خوب در دوی سرعت نه تنها میتواند باعث توسعه نیروهای افقی در هنگام ترک تخته استارت شود، بلکه افزایش نیروهای افقی در گامهای بعدی را در پی خواهد داشت.
نتیجهگیری نهایی
با توجه به اینکه تفاوت در دو نمودار تنها در فازهای ابتدایی حرکت اتفاق افتاده و در استارت منتخب ما تغییر از همفازی به ناهمفازی و بالعکس را بیشتر مشاهده کردیم، در واقع بینظمی بیشتری در فازهای ابتدایی استارت منتخب وجود دارد، در حالی که در ادامه نمودارهای هماهنگی منطبق بر هم پیش رفتند.
افراد نوع حرکت در استارت منتخب (استارت منتخب در این تحقیق) را به سمت نوع حرکت همیشگی و روال خود که در ناخودآگاه آنان وجود داشت، پیش بردند و به نوعی بر بینظمی ایجاد شده در هماهنگی دو اندام غلبه کردند. به نظر میرسد در صورتی که این روند تأثیری در متغیرهای سرعت و شتاب ورزشکار ایجاد نکند، با احتیاط میتوان گفت که نشستن به هر صورتی در تکنیک استارت نهایتاً باعث ایجاد یک هماهنگی مشترک میشود و تأثیری در ادامه حرکت نخواهد داشت. این مورد به تحقیقات بیشتر و سنجش متغیرهای بیشتر، از جمله سرعت و شتاب حرکت اندام و مفاصل میتواند نتایج دقیقتری به همراه آورد.
ملاحظات اخلاقی
پیروی از اصول اخلاق پژوهش
شایان ذکر است تمامی آزمودنیها فرم رضایتنامه کتبی شرکت در مطالعه را تکمیل و امضا کردند و کد اخلاق با شماره 1007/1000 ک.1.پ از پژوهشکده علوم حرکتی دانشگاه خوارزمی توسط پژوهشگر اخذ شد.
حامی مالی
این مقاله از پایاننامه کارشناسی ارشد نویسنده اول در گروه بیومکانیک ورزشی دانشکده تربیت بدنی و علوم ورزشی دانشگاه خوارزمی استخراج شده است.
مشارکت نویسندگان
تمامی نویسندگان در انجام و نگارش مطالعه حاضر، به میزان یکسان، مشارکت داشتند.
تعارض منافع
بنابر اظهار نویسندگان، این مقاله هیچ گونه تعارض منافع ندارد.
تشکر و قدردانی
بدینوسیله نویسندگان این مقاله از تمامی کسانی که در انجام این پژوهش ما را یاری رساندند، کمال تشکر و قدردانی را دارند.
مطالعه حاضر نشان داد که الگوی هماهنگی اندام تحتانی در فازهای ابتدایی بین دو نوع استارت تفاوت معناداری داشت، اما از فاز چهارم به بعد الگوی دو مفصل مشابه بود. به طور کلی در نمودارهای هماهنگی، زمانی که CRP برابر با صفر درجه است، حرکت دو نوسانگر همفاز است؛ یعنی دو نوسانگر حرکتی در یک جهت را انجام میدهند و زاویه CRP برابر با 180 درجه نوسان کاملاً ناهمفاز دو نوسانگر را نشان میدهد، دو نوسانگر حرکتی کاملا مخالف هم به نمایش گذاشتهاند.
هر زاویه CRP بین صفر تا 180 درجه نشاندهنده نوسانات غیرهمفاز است که میتواند تمایل به همفازی و یا ناهمفازی داشته باشد. مقادیر CRP مثبت نشان میدهد که اندام دیستال در فضای فازی پیش گرفته و CRP منفی نشاندهنده پیش گرفتن اندام پروگزیمال است. همچنین شیب منحنی سریعتر بودن حرکت اندامها در طول هر دوره را نشان میدهد، که شیب مثبت نشاندهنده حرکت سریعتر اندام دیستال و شیب منفی نشاندهنده حرکت سریعتر اندام پروگزیمال است [12 ،11].
هماهنگی زانو به مچ پای جلو: در ابتدای حرکت و در فاز اول حرکت در استارت منتخب زانو و مچ پا هماهنگی غیرهمفازی را از خود نشان میدهند، به صورتی که زانو در حال اکستنشن و مچپا در حال دورسی فلکشن بوده، که در حال حرکت به سمت همفازی است. این حرکت به سمت همفازی تا فاز دوم ادامه پیدا میکند و بعد از آن دوباره به سمت ناهمفازی میرود، در صورتی که در استارت اختیاری حرکت در فاز اول و دوم حالت یکنواختی دارد و از فاز دوم به بعد به سمت همفازی و سپس ناهمفازی میرود.
در استارت منتخب، در ابتدای حرکت زانو حرکت سریعتری نسبت به مچ پا در فضای فازی دارد و از فاز دوم به بعد حرکت مچ پا سریعتر میشود، در حالی که این حرکت دو مفصل تا فاز دوم در استارت اختیاری یکنواحت است و بعد از فاز دوم همانند استارت منتخب مچ پا حرکت سریعتری در صفحه فازی دارد، از فاز سوم به بعد هر دو اندام حرکت مشابهی را نشان میدهند. هماهنگی زانو به مچ پای عقب: در این هماهنگی هر دو پا علیرغم تفاوت در زاویه و فاصله بلوکها هماهنگی مشابهی را نشان میدهند.
هماهنگی ران به زانوی جلو: در استارت منتخب دو مفصل ران و زانو حرکت را در حال ناهمفازی بیشتری نسبت به استارت اختیاری آغاز کرده که در فاز دوم این ناهمفازی ادامه پیدا کند، در واقع با بیشتر شدن اکستنشن در زانو ران به اکستنش بیشتری میرود و از فاز دوم به بعد هر دو مفصل در دو استارت رویه مشابهی را پیش گرفته و به سمت همفازی پیش میروند و از فاز چهار به بعد دو نمودار بر هم منطبق شدند.
هماهنگی ران به زانوی عقب: در فاز اول هر دو اندام از یک حالت همفازی حرکت را آغاز کردهاند که در استارت اختیاری این همفازی تا فاز پنجم ادامه پیدا میکند، در صورتی که در استارت منتخب این همفازی به سمت ناهمفازی پیش رفته و بعد از فاز چهارم مجدد به سمت همفازی پیش رفته و سپس دو نمودار بر هم منطبق شدهاند.
هماهنگی ران به مچ پای جلو: در استارت اختیاری حرکت به صورت ناهمفاز آغاز شده به این صورت که با دورسی فلکشن مچپا ران به اکستنشن میرود، در ادامه با افزایش سرعت اکستنش ران در صفحه فازی هر دو مفصل به سمت همفازی پیش میروند، در حالی که در استارت اختیاری حرکت از همفازی دو مفصل آغاز شده که از فاز دوم به سمت ناهمفازی و دوباره به سمت هم فازی میرود.
دو نمودار از فاز چهارم به بعد با هم منطبق میشوند. از فاز شش تا هفت استارت اختیاری، یکنواختی در حرکت مشاهده میشود، در حالی که استارت منتخب به سمت ناهمفازی بیشتر پیش رفته است. هماهنگی ران به مچپای عقب: در دو نمودار استارت اختیاری و منتخب تفاوت چندانی دیده نمیشود و دو نمودار بر هم منطبق هستند.
اسکات بیان داشت که استارت کوتاه، سرعت بالاتر و استارت بلند باعث جلو راندن بیشتر فرد میشود، همچنین آنالیز دویدن افراد نشان میدهد که استارت بلند با طول گام بیشتر و سرعت بالا همراه است که میتواند شروع مناسبی برای دویدن فرد باشد [8]. با توجه به اینکه استارت منتخب در این تحقیق استارت بلند بود، این نکته را میتوان مشاهده کرد که تفاوت در دو نوع استارت در این تحقیق میتواند ناشی از ترجیح دوندگان به استفاده از استارت کوتاه باشد.
پیشنهاد شده است که متغیرهای کینماتیکی مانند زاویه زانو، مچ پا و زاویه چرخش شانه از اهمیت کلیدی در دوی سرعت برخوردار هستند و تأثیر روشنی بر عملکرد استارت دوی سرعت دارند [24]. در مقابل برخی محققان روابط قابل ملاحظهای بین زوایای زانو، لگن و مفصل مچ پا و عملکرد استارت در دوی سرعت پیدا نکردند [25].
محققان مطرح کردند که قویترین و سریعترین دوندگان سرعت بیشتری هنگام ترک تخته استارت دارند که ناشی از زاویه حاد مفاصل اندام تحتانی در حالت قرارگیری روی تخته استارت است که اجازه میدهد دامنه بزرگتری از اکستنشن مفاصل را داشته باشیم [26].
با توجه به اینکه در این تحقیق در استارت نوع منتخب زاویه 100 درجه را در زانوی عقب داشتیم و این باعث کاهش زاویه ران در هر دو پا به دلیل نحوه قرارگیری میشد. تفاوت تنها در 40 درصد ابتدا مشاهده شد که میتواند ناشی از همین موضوع باشد. هانتر و همکاران [27] بیان کردند که یک شروع خوب در دوی سرعت نه تنها میتواند باعث توسعه نیروهای افقی در هنگام ترک تخته استارت شود، بلکه افزایش نیروهای افقی در گامهای بعدی را در پی خواهد داشت.
نتیجهگیری نهایی
با توجه به اینکه تفاوت در دو نمودار تنها در فازهای ابتدایی حرکت اتفاق افتاده و در استارت منتخب ما تغییر از همفازی به ناهمفازی و بالعکس را بیشتر مشاهده کردیم، در واقع بینظمی بیشتری در فازهای ابتدایی استارت منتخب وجود دارد، در حالی که در ادامه نمودارهای هماهنگی منطبق بر هم پیش رفتند.
افراد نوع حرکت در استارت منتخب (استارت منتخب در این تحقیق) را به سمت نوع حرکت همیشگی و روال خود که در ناخودآگاه آنان وجود داشت، پیش بردند و به نوعی بر بینظمی ایجاد شده در هماهنگی دو اندام غلبه کردند. به نظر میرسد در صورتی که این روند تأثیری در متغیرهای سرعت و شتاب ورزشکار ایجاد نکند، با احتیاط میتوان گفت که نشستن به هر صورتی در تکنیک استارت نهایتاً باعث ایجاد یک هماهنگی مشترک میشود و تأثیری در ادامه حرکت نخواهد داشت. این مورد به تحقیقات بیشتر و سنجش متغیرهای بیشتر، از جمله سرعت و شتاب حرکت اندام و مفاصل میتواند نتایج دقیقتری به همراه آورد.
ملاحظات اخلاقی
پیروی از اصول اخلاق پژوهش
شایان ذکر است تمامی آزمودنیها فرم رضایتنامه کتبی شرکت در مطالعه را تکمیل و امضا کردند و کد اخلاق با شماره 1007/1000 ک.1.پ از پژوهشکده علوم حرکتی دانشگاه خوارزمی توسط پژوهشگر اخذ شد.
حامی مالی
این مقاله از پایاننامه کارشناسی ارشد نویسنده اول در گروه بیومکانیک ورزشی دانشکده تربیت بدنی و علوم ورزشی دانشگاه خوارزمی استخراج شده است.
مشارکت نویسندگان
تمامی نویسندگان در انجام و نگارش مطالعه حاضر، به میزان یکسان، مشارکت داشتند.
تعارض منافع
بنابر اظهار نویسندگان، این مقاله هیچ گونه تعارض منافع ندارد.
تشکر و قدردانی
بدینوسیله نویسندگان این مقاله از تمامی کسانی که در انجام این پژوهش ما را یاری رساندند، کمال تشکر و قدردانی را دارند.
References
1.Cronin JB, Hansen KT. Strength and power predictors of sports speed. J Strength Cond. Res. 2005; 19(2): 349-57. [DOI:10.1519/00124278-200505000-00019] [PMID]
2.Harland MJ, Andrews MH, Steele JR. Instrumented start blocks: A quantitative coaching aid. ISBS-Conference Proceedings Archive; 1995. https://ojs.ub.uni-konstanz.de/cpa/article/view/2952
3.Tellez, T., & Doolittle, D. Sprinting from start to finish. Track Tech. 1984; 88:2802-5. https://scholar.google.com/scholar?hl=nl&as_sdt=0%2C5&q=Sprinting+from+start+to+finish.&btnG=
4.Bezodis NE, Salo AI, Trewartha G. Choice of sprint start performance measure affects the performance-based ranking within a group of sprinters: Which is the most appropriate measure? Sports Biomech. 2010; 9(4):258-69. [DOI:10.1080/14763141.2010.538713] [PMID]
5.Čoh M, Tomažin K. Kinematic analysis of the sprint start and acceleration from the blocks. New Stud in Athletics. 2006; 21(3):23-33. https://www.researchgate.net/publication/298645089_Kinematic_analysis_of_the_sprint_start_and_acceleration_from_the_blocks
6.Slawinski J, Bonnefoy A, Levêque JM, Ontanon G, Riquet A, Dumas R, et al. Kinematic and kinetic comparisons of elite and well-trained sprinters during sprint start. J Strength Cond. Res. 2010; 24(4):896-905. [DOI:10.1519/JSC.0b013e3181ad3448] [PMID]
7.Mero A, Kuitunen S, Harland M, Kyröläinen H, Komi PV. Effects of muscle-tendon length on joint moment and power during sprint starts. J Sports Sci. 2006; 24(2):165-73. [DOI:10.1080/02640410500131753] [PMID]
8.Schot PK, Knutzen KM. A biomechanical analysis of four sprint start positions. Res Q Exerc Sport. 1992; 63(2):137-47. [DOI:10.1080/02701367.1992.10607573] [PMID]
9.Thelen E. Motor development: A new synthesis. Am Psychol. 1995; 50(2):79-95. [DOI:10.1037/0003-066X.50.2.79]
10.Bernstein N. The co-ordination and regulation of movements. 1st English ed. London: Pergamon; 1967.
11.Stergiou N. Innovative Analyses of Human Movement. Human Kinetics, Champaign, IL; 2004. https://www.amazon.com/Innovative-Analyses-Movement-Nicholas-Stergiou/dp/0736044671
12.Robertson G, Caldwell G, Hamill J, Kamen G, et al. Research methods in biomechanics, 2nd edition. Human Kinetics; 2013. 291-315. [DOI:10.5040/9781492595809]
13.Wolfgang T. Biomechanical quantification of the dynamic knee valgus using inertial sensor system myomotion. Gießen, Justus; 2016.
14.Balasubramanian S. Comparison of Angle Measurements between Vicon and Myomotion System. Arizona State University. 2013. https://www.semanticscholar.org/paper/COMPARISON-OF-ANGLE-MEASUREMENTS-BETWEEN-VICON-AND/1641d6ece74c8e7e9e5f06595bad7b49540bc53a
15.Noraxon. MyoMotion System User Guide 2014. 1-99
16.Harland M, Steele JR. Biomechanics of the sprint start. J Sports Medicine. 1997; 23(1):11-20. [DOI:10.2165/00007256-199723010-00002] [PMID]
17.Khezri D, Eslami M, Yaserifar M. The effect of variation of shoe sole stiffness on coordination pattern and it’s variability in tars-metatarsal and forefoot-hallux joints during stance phase of running (Persion)]. Iranian Association of Physical Education and Sports Sciences. 19-20 March 2016. Kharazmi University; 2016. https://www.sid.ir/Fa/Seminar/ViewPaper.aspx?ID=26874
18.Silvernail JF, Boyer K, Rohr E, Brüggemann GP, Hamill J. Running mechanics and variability with aging. J Med Sci Sports Exerc. 2015; 47(10):2175-80. [DOI:10.1249/MSS.0000000000000633] [PMID]
19.Wheat JS, Glazier PS. Measuring coordination and variability in coordination. In: Movement System Variability. Davids K, Bennett S, Newel K, editors, Chapter 9. Human Kinetics. 2005; 167-81. [DOI:10.5040/9781492596851.ch-009]
20.Hamill J, van Emmerik RE, Heiderscheit BC, Li L. A dynamical systems approach to lower extremity running injuries. Clin Biomech (Bristol, Avon). 1999; 14(5):297-308. [DOI:10.1016/S0268-0033(98)90092-4]
21.Milanese C, Bertucco M, Zancanaro C. The effects of three different rear knee angles on kinematics in the sprint start. J Biology of Sport. 2014; 31(3):209-15. [DOI:10.5604/20831862.1111848] [PMID] [PMCID]
22.Ciacci S, Merni F, Bartolomei S, Di Michele R. Sprint start kinematics during competition in elite and world-class male and female sprinters. J Sports Sci. 2017; 35(13):1270-8. [DOI:10.1080/02640414.2016.1221519] [PMID]
23.Chen Y, Wu KY, Tsai YJ, Yang WT, et al. The kinematic differences of three types of crouched position during sprint start. J Mech Med Biol. 2016; 16(7):1650099. [DOI:10.1142/S0219519416500998]
24.Ansari NW, Paul Y, Sharma K. Kinematic analysis of competitive sprinting: Biomechanics. Afr J Phys Health Educ Recreat Dance. 2012; 18(4):662-71. https://www.ajol.info/index.php/ajpherd/article/view/83832
25.Chakravarty R. The relationship of selected kinematical variables of the performance of runners in sprint start. Int J Sports Sci Fit. 2011; 1(1):60-7.
26.Maulder PS, Bradshaw EJ, Keogh J. Jump kinetic determinants of sprint acceleration performance from starting blocks in male sprinters. J Sports Sci Med. 2006; 5(2):359-66. [PMID] [PMCID]
27.Hunter JP, Marshall RN, McNair PJ. Interaction of step length and step rate during sprint running. J Med Sci Sports Exerc. 2004; 36(2):261-71. [DOI:10.1249/01.MSS.0000113664.15777.53] [PMID]
1.Cronin JB, Hansen KT. Strength and power predictors of sports speed. J Strength Cond. Res. 2005; 19(2): 349-57. [DOI:10.1519/00124278-200505000-00019] [PMID]
2.Harland MJ, Andrews MH, Steele JR. Instrumented start blocks: A quantitative coaching aid. ISBS-Conference Proceedings Archive; 1995. https://ojs.ub.uni-konstanz.de/cpa/article/view/2952
3.Tellez, T., & Doolittle, D. Sprinting from start to finish. Track Tech. 1984; 88:2802-5. https://scholar.google.com/scholar?hl=nl&as_sdt=0%2C5&q=Sprinting+from+start+to+finish.&btnG=
4.Bezodis NE, Salo AI, Trewartha G. Choice of sprint start performance measure affects the performance-based ranking within a group of sprinters: Which is the most appropriate measure? Sports Biomech. 2010; 9(4):258-69. [DOI:10.1080/14763141.2010.538713] [PMID]
5.Čoh M, Tomažin K. Kinematic analysis of the sprint start and acceleration from the blocks. New Stud in Athletics. 2006; 21(3):23-33. https://www.researchgate.net/publication/298645089_Kinematic_analysis_of_the_sprint_start_and_acceleration_from_the_blocks
6.Slawinski J, Bonnefoy A, Levêque JM, Ontanon G, Riquet A, Dumas R, et al. Kinematic and kinetic comparisons of elite and well-trained sprinters during sprint start. J Strength Cond. Res. 2010; 24(4):896-905. [DOI:10.1519/JSC.0b013e3181ad3448] [PMID]
7.Mero A, Kuitunen S, Harland M, Kyröläinen H, Komi PV. Effects of muscle-tendon length on joint moment and power during sprint starts. J Sports Sci. 2006; 24(2):165-73. [DOI:10.1080/02640410500131753] [PMID]
8.Schot PK, Knutzen KM. A biomechanical analysis of four sprint start positions. Res Q Exerc Sport. 1992; 63(2):137-47. [DOI:10.1080/02701367.1992.10607573] [PMID]
9.Thelen E. Motor development: A new synthesis. Am Psychol. 1995; 50(2):79-95. [DOI:10.1037/0003-066X.50.2.79]
10.Bernstein N. The co-ordination and regulation of movements. 1st English ed. London: Pergamon; 1967.
11.Stergiou N. Innovative Analyses of Human Movement. Human Kinetics, Champaign, IL; 2004. https://www.amazon.com/Innovative-Analyses-Movement-Nicholas-Stergiou/dp/0736044671
12.Robertson G, Caldwell G, Hamill J, Kamen G, et al. Research methods in biomechanics, 2nd edition. Human Kinetics; 2013. 291-315. [DOI:10.5040/9781492595809]
13.Wolfgang T. Biomechanical quantification of the dynamic knee valgus using inertial sensor system myomotion. Gießen, Justus; 2016.
14.Balasubramanian S. Comparison of Angle Measurements between Vicon and Myomotion System. Arizona State University. 2013. https://www.semanticscholar.org/paper/COMPARISON-OF-ANGLE-MEASUREMENTS-BETWEEN-VICON-AND/1641d6ece74c8e7e9e5f06595bad7b49540bc53a
15.Noraxon. MyoMotion System User Guide 2014. 1-99
16.Harland M, Steele JR. Biomechanics of the sprint start. J Sports Medicine. 1997; 23(1):11-20. [DOI:10.2165/00007256-199723010-00002] [PMID]
17.Khezri D, Eslami M, Yaserifar M. The effect of variation of shoe sole stiffness on coordination pattern and it’s variability in tars-metatarsal and forefoot-hallux joints during stance phase of running (Persion)]. Iranian Association of Physical Education and Sports Sciences. 19-20 March 2016. Kharazmi University; 2016. https://www.sid.ir/Fa/Seminar/ViewPaper.aspx?ID=26874
18.Silvernail JF, Boyer K, Rohr E, Brüggemann GP, Hamill J. Running mechanics and variability with aging. J Med Sci Sports Exerc. 2015; 47(10):2175-80. [DOI:10.1249/MSS.0000000000000633] [PMID]
19.Wheat JS, Glazier PS. Measuring coordination and variability in coordination. In: Movement System Variability. Davids K, Bennett S, Newel K, editors, Chapter 9. Human Kinetics. 2005; 167-81. [DOI:10.5040/9781492596851.ch-009]
20.Hamill J, van Emmerik RE, Heiderscheit BC, Li L. A dynamical systems approach to lower extremity running injuries. Clin Biomech (Bristol, Avon). 1999; 14(5):297-308. [DOI:10.1016/S0268-0033(98)90092-4]
21.Milanese C, Bertucco M, Zancanaro C. The effects of three different rear knee angles on kinematics in the sprint start. J Biology of Sport. 2014; 31(3):209-15. [DOI:10.5604/20831862.1111848] [PMID] [PMCID]
22.Ciacci S, Merni F, Bartolomei S, Di Michele R. Sprint start kinematics during competition in elite and world-class male and female sprinters. J Sports Sci. 2017; 35(13):1270-8. [DOI:10.1080/02640414.2016.1221519] [PMID]
23.Chen Y, Wu KY, Tsai YJ, Yang WT, et al. The kinematic differences of three types of crouched position during sprint start. J Mech Med Biol. 2016; 16(7):1650099. [DOI:10.1142/S0219519416500998]
24.Ansari NW, Paul Y, Sharma K. Kinematic analysis of competitive sprinting: Biomechanics. Afr J Phys Health Educ Recreat Dance. 2012; 18(4):662-71. https://www.ajol.info/index.php/ajpherd/article/view/83832
25.Chakravarty R. The relationship of selected kinematical variables of the performance of runners in sprint start. Int J Sports Sci Fit. 2011; 1(1):60-7.
26.Maulder PS, Bradshaw EJ, Keogh J. Jump kinetic determinants of sprint acceleration performance from starting blocks in male sprinters. J Sports Sci Med. 2006; 5(2):359-66. [PMID] [PMCID]
27.Hunter JP, Marshall RN, McNair PJ. Interaction of step length and step rate during sprint running. J Med Sci Sports Exerc. 2004; 36(2):261-71. [DOI:10.1249/01.MSS.0000113664.15777.53] [PMID]
| بازنشر اطلاعات | |
 |
این مقاله تحت شرایط Creative Commons Attribution-NonCommercial 4.0 International License قابل بازنشر است. |

تماس با ما
فصلنامه بیومکانیک ورزشی
همدان،شهرک مدنی، بلوار امام خمینی(ره)، بلوار پروفسور موسیوند، مجتمع دانشگاه آزاد اسلامی واحد همدان، معاونت پژوهش و فناوری، دفتر مجلات علمی
صندوق پستی: 734
تلفن دفتر نشریه: 08134494042
وبسایت: http://biomechanics.iauh.ac.ir
ایمیل: sportbiomechanics@iauh.ac.ir