دوره 8، شماره 4 - ( 12-1401 )
جلد 8 شماره 4 صفحات 342-330 |
برگشت به فهرست نسخه ها



![]()
![]()
![]()
Download citation:
BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:



BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:
Malekipooya M. Designing and Manufacturing Smart Sports-Medical Shoes. J Sport Biomech 2023; 8 (4) :330-342
URL: http://biomechanics.iauh.ac.ir/article-1-305-fa.html
URL: http://biomechanics.iauh.ac.ir/article-1-305-fa.html
ملکی پویا محمد. طراحی و ساخت کفش هوشمند ورزشی-پزشکی. مجله بیومکانیک ورزشی. 1401; 8 (4) :330-342



گروه فیزیولوژی ورزشی، دانشگاه آزاد اسلامی واحد پرفسور حسابی، تفرش، ایران.
متن کامل [PDF 1909 kb]
(955 دریافت)
| چکیده (HTML) (1866 مشاهده)
متن کامل: (1636 مشاهده)
مقدمه
پا مهمترین اندام ﺗﻌﺎﻣﻞ زﻣﯿﻦ و ﺑﺪن در اﻧﺴﺎن میباشد. ﺳﺎﺧﺘﺎر ﻋﻤﻠﮑﺮدی آن ﺑﺮ اﻟﮕﻮی راه رﻓﺘﻦ بسیار تاثیرگذار میباشد (2-1). ﻫﺮﮔﻮﻧﻪ اﻧﺤﺮاف در ﭘﺎﻫﺎ اﺛﺮ ﺧﻮد را بهترتیب ﺑﻪ ﻣﻔﺎﺻﻞ و اﻧﺪامﻫﺎی ﺑﺎﻻﺗﺮ منتقل میکند. تغییر و جابهجایی در ساختار آناتومی و اﺳﺘﺨﻮانهای ﭘﺎ منجر به حرکت ﻏﯿﺮﻃﺒﯿﻌﯽ ﭘﺎ ﻫﻨﮕﺎم راه رﻓﺘﻦ ﻣﯽﺷﻮد. از ایﻦرو، ﺑﺮوز ﻧﺎﻫﻨﺠﺎری در ایﻦ بخش ﺑﻪ ﻟﺤﺎظ ﺑﯿﻮﻣﮑﺎﻧﯿﮑﯽ اﻫﻤﯿﺖ ویژهای را به هم راه دارد (2). در همین راستا ﮐﻔﺶ ﺑﻪﻋﻨﻮان یک ابزار ضروری و خیلی مهم ﻧﻘﺶ بسزایی در گام ﺑﺮداری ﺑﻬﯿﻨﻪ و حمایت از اندام تحتانی به همراه دارد. ﺗﺤﻘﯿﻘﺎت ﻧﺸﺎن ﻣﯽدﻫﻨﺪ ﮐﻪ ﻃﺮاﺣﯽ مناسب ﮐﻔﺶ ﻣﯽﺗﻮاﻧﺪ ﺗﻐﯿﯿﺮ ﻗﺎﺑﻞﺗﻮﺟﻬﯽ در ﭘﺎراﻣﺘﺮﻫﺎی ﺑﯿﻮﻣﮑﺎﻧﯿﮑﯽ ﭘﺎ ایﺠﺎد ﻧﻤﺎیﺪ. ﺑﻪ ایﻦ ﻣﻨﻈﻮر ﺗﻮﻟﯿﺪﮐﻨﻨﺪﮔﺎن ﮐﻔﺶ ﺗﻐﯿﯿﺮات ﻣﺨﺘﻠﻔﯽ را در آن ﺑﻪوﺟﻮد میآوردند تا در مکانیک حرکت انسان مناسب باشد. لذا توجه به نوعآوریهای جدید در این بخش بسیار ضروری بوده و نیازمند تحقیقات بیشتری از محققین میباشد. فنآوری در دنیا از مهمترین ابزار پیشرفت، جلوگیری از آسیب و بازتوانی ورزشکاران بهشمار میآید. در تأمین ایمنی اندازهگیری و ارزیابی فنون و مهارتهای ورزشی و به دنبال آن بالا بردن همهجانبه سطوح عملکردی، بهویژه در رقابتهای ورزشی ورزشکاران که پیشرو میباشد، همگام با توسعه تکنولوژی و فنآوری در حوزه ورزش، همچنین ساخت تجهیزات مورد توجه قرار گرفته است (3). حوزه تحقیقات کاربردی در بیومکانیک در ارتباط با مسائل پایهای و مبنایی برای درک بهتر مفاهیم موجود و علت پردازی علم در اجرا است. در این حوزه محققان گوناگونی از جمله متخصصان بیومکانیک، مهندسین ورزشی، ریاضیدانان، زیست شناسان و غیره به توصیف کیفی، کمیسازی و طبقهبندی حرکت ناشی از عملکرد بدن انسان میپردازند که از اصلیترین روشهای بررسی ابعاد مکانیکی حرکات در تمرین روش توصیفی و کمی آن میباشد. در روش توصیفی، ابعاد یک پدیده توصیف میگردد، اما در روش کمی، به تجزیه و تحلیل مهارت یا حرکت با استفاده از عدد مورد توجه قرار میگیرد. به کمیت درآوردن مهارت یا فن حرکتی ضمن افزایش دقت در درک چگونگی و ابعاد حرکت، کیفیت توصیف پدیدهها را نیز بالا میبرد. به جهت تبدیل مهارتهای حرکتی و فنون به کمیت، روشهای فنآورانه متفاوتی وجود دارد که برخی از این تحلیلها که با استفاده از پردازش تصویری و تجهیزات آزمایشگاهی با هزینه زیاد و در محیط غیر میدانی صورت میپذیرد. آنالیز حرکات به دانش بررسی و مطالعه نحوه حرکت حیوانات و بهطور تخصصیتر نحوه حرکت انسان با استفاده از ابزارهای سنجش و اندازهگیری حرکت بدن، مکانیک بدن و فعالیت عضلات بدن و همچنین چشم و مغز مشاهدهکننده، گفته شود. آنالیز حرکت برای ارزیابی، برنامهریزی و درمان نحوه حرکت افراد و بهخصوص افراد آسیبدیده به کار میرود. همچنین از این علم در بیومکانیک ورزشی برای کمک به ورزشکاران جهت بهتر و مؤثرتر دویدن استفاده میشود. دانشمندانی مانند آریستول و جووانو آلفونسو بورلی در زمانهای گذشته به آنالیز علمی حرکت بدن علاقهمند بودند. در قرن نوزدهم پژوهشگرانی مانند کریستین ویلهلم بران به همراه اتو فیشر مجموعهای از تحقیقات علمی خود در خصوص بیومکانیک حرکت انسان را منتشر کردند. در ادامه با پیشرفت فنآوری و IT ورزشی تصویربرداری و ضبط فیلم میسر گردید تا بهواسطه آن روند حرکت در انسان بهصورت دوبعدی و سهبعدی میسر گردد. این امر به کشف شدن برخی از زوایای پنهان بیومکانیک حرکت انسان منجر شد که تا پیش از آن زمان، فهم با چشم غیرمسلح امکانپذیر نبود. ادوارد میبریج و ژولز ماری از محققین استفاده از این روش در آنالیز حرکت انسان بودند. تولید علم و کشف حقایق جدید در بسیاری از حیطهها ملزم به همراه داشتن ابزار اندازهگیری دقیق میباشد. امروزه بررسی و شناخت دقیق حرکات انسان همچون راه رفتن، ایستادن، وضعیت قوس کف پا، ارتوپدی جهت بررسی پروتزهای جایگزین، فیزیوتراپی مفاصل آسیبدیده و تحلیل حرکات ورزشی، ضروری است (4). محاسبات کینماتیک در ورزش به اشکال متفاوتی انجام میگردد که گونیامتری و شتابسنجی از اشکال پرکاربرد آن میباشد که برخی پارامترهای مهم کینماتیک حرکت را بهطور مستقیم محاسبه میکنند. پرتابل بودن، قابلیت انتقال سریع اطلاعات به رایانه و قیمت نهچندان زیاد این وسایل، برخی از مزایای این سبک تحقیقاتی میباشد (5). در سالیان اخیر، نسخههایی از حسگرهای ماتریکسی و مغناطیسی ارائه شد که بدون تصویربرداری به بررسی، پارامترهای کینماتیکی و همچنین کینتیکی در اندازهگیری پرداخته است (7-6). مشکل اصلی برخی از این دستگاههای مشابه محدودیت حرکتی در عملکرد و اجرای میدانی ورزشکاران میباشد. استفاده از حسگرهای تعبیهشده در بدن مانند کفش و میدانی بودن آن توانست تا حدودی این محدودیتها را کاهش دهد (8). گفتنی است الگوسازی حرکت انسان و استفاده از دستگاههایی که نیازی به نشانگر نداشتند، روشها دیگری برای تحلیل حرکت بودند که البته هرکدام با محدودیتهایی همراه بودند. امروزه روشهای رایج برای محاسبه ابعاد حرکتی استفاده از تکنیک تصویربرداری و الگوریتم پردازش تصویر و استفاده از نیروسنجهای متفاوت و حسگرها یا اشکال متفاوتی از فورس¬پلیتها در سینتیک میباشد. دقت مطلوب، قابلیت پردازش در لحظه و نداشتن محدودیت حرکتی برای کاربر توسط نشانگرها از مزایایی دستگاههای مشابه میباشد. این دستگاه از دو بخش سختافزاری و نرمافزاری تشکیل شده که میتواند به توصیف پارامترهای بیان شده بپردازد. در بخش توصیف حرکت زمان، سرعت، شتاب و مکان مورد بررسی قرار میگیرد و در بخش کینتیکی بررسی نیروی حرکتی از پنجه تا پاشنه مورد توجه قرار میگیرد. بخشی از اجزای سختافزاری این دستگاه عبارتاند از میکروکنترلر، رگلاتورها، کریستال، مقاومتها، خازنها، سلف، ال.ای.دی، سنسورها، ماژول، مبدل و بخش نرمافزاری این دستگاه با زبان برنامهنویسی پیشرفته C انجام پذیرفت. از دستگاههای متفاوتی برای اندازهگیری فشار وارده بر کف پا در پژوهشهای متفاوت استفاده شده است. دﺳﺘﮕﺎه ﻓﻮت اﺳﮑﻦ (ﻣﺪل RSscan ﺑﻪ اﺑﻌﺎد 4/0×1 ﻣﺘﺮ ﺳﺎﺧﺖ ﮐﺸﻮر ﺑﻠﮋیﮏ) ازجمله این موارد میباشد. ایﻦ دﺳﺘﮕﺎه در وﺳﻂ ﻣﺴﯿﺮ راه رﻓﺘﻦ ﺑﻪﮔﻮﻧﻪای ﺟﺎیﮔﺬاری میشود ﮐﻪ آزﻣﻮدﻧﯽﻫﺎ ﻗﺎدر ﺑﻪ ﺗﺸﺨﯿﺺ فشارِ وارده میباشند (9). همچنین دستگاه رایج صفحه نیرو یکی از رایجترین دستگاههای جهت بررسی مقادیر متفاوتی از نیروی اعمالشده در راستاهای متفاوت است که بیشتر آزمایشگاهی بوده و کاربرد میدانی کمتری نسبت به کفش هوشمند دارد (10). در تحقیق فوق بررسی تغییرات نیروی وارده در استارتهایی مانند دو و نیروی وارده از پنجه به سمت پاشنه بهواسطه فلکسیوفورسها جهت بررسی آسیبهای احتمالی و دیگر موارد مورد بررسی قرار میگیرد. همچنین امکان بررسی شتاب، تغییرات مکانی و زمانی برای مربی و ورزشکار جهت تجزیه و تحلیل حرکتی ایجاد میگردد. بعد کالیبراسیون دستگاه میتوان بهعنوان یک ابزار پژوهشی در اختیار کلیه دانشگاهها، پژوهشکدهها، فدراسیونها و دانشجویان علاقهمند در حوزه فنآوری ورزشی قرار گیرد. قابلیت بررسی دقیق حرکتی و فیدبک مثبت امکان ثبت رکورد بهتر در مسابقات قهرمانی بهواسطه این دستگاه امکانپذیر خواهد بود و بهعنوان یک ابزار تحقیق مناسب جهت تشخیص و افتراق اختلاف نیروی در افراد داری کف پای صاف که شایعترین عارضه اندام تحتانی بوده (12-11) پرداخته و به کمیسیون پزشکی نیروی انتظامی در معافیت از رزم یا سربازی کمک میکنند. از اینرو بهدلایل فوق محقق این دستگاه را ابداع و ثبت کرد تا بتواند گام مثبتی در این حوزه برداشته شود.
روش شناسی
در این مرحله ورزشکار کفش را پوشیده و تجهیزات را به کمر و پای خود با کش محکم بسته و مورد حمایت قرار میدهد. ماژولهای ارسال و دریافت اطلاعات نیز در حین شروع تمرین روش میشود. فرد در حین انجام تمرین در آزمایشگاه و بهویژه در شرایط میدانی این کفش را پوشیده و با روشن شدن دستگاه اطلاعاتی مانند مکان، زمان، شتاب و نیروی وارده به نرمافزار محققساخته در رایانه وارد میشود. مربی یا محقق هم میتواند در فاصلۀ حداکثر 300 متر با توجه به قابلیت ماژول اطلاعات را دریافت کرده و تجزیه تحلیل نماید. در شکل 1 نمونه آزمایشگاهی این کفش به نمایش گذاشته شده است. این طرح به گواهی شماره 74929 مورخ 17/2/1391 به نام نویسنده مقاله اختراع و به ثبت اداره مالکیتهای صنعتی ایران رسیده است.

اجزای سختافزاری کفش
1- میکروکنترلر
این بخش از شرکت ATMEL و با سرعت 16 Mips و فرکانس 16 MHz خریداری گردید. این بخش سختافزاری دارای حافظه 16 kb با قابلیت 10.000 نوشتن و پاک کردن را به همراه داشت که در شکل 2 نشان داده شده است.
2- رگلاتورها
از رگلاتور LM 7805 برای ولتاژ 5 ولت، رگلاتور LF 33CV برای ولتاژ 3/3 ولت و رگلاتور LM 336 برای ولتاژ 5/2 ولت تبدیلکننده آنالگ به دیجیتال استفاده شد که در شکل 3 نشان داده شده است.

3- کریستال
از کریستال 05/11 مگاهرتز برای تأمین فرکانس میکروکنترلر استفاده شد.
4- مقاومتها
مقاومت بهکاررفته در این فنآوری 330 اهم میباشد که برای تأمین جریانLED های نشاندهنده ولتاژ خروجی و تأمین جریان LED نمایشگر آماده بهکار بودن سیستم، مقاومت 10 کیلواهمی متغیر برای تغییر سطح ولتاژ رگولاتور LM 336 و 2 عدد مقاومت 10 اهم برای Pull up کردن باس TWI مورد استفاده قرار گرفت.
5- خازنها
در این پروژه از 2 عدد خازن 22 نانوفاراد برای کریستال، خازن 100 نانوفاراد برای فیلترینگ سنسور دما SMT160، خازن 10 نانوفاراد برای فیلترینگ سنسور دما LM75، خازن 100 نانوفاراد برای فیلتر تبدیلکننده آنالوگ به دیجیتال و خازن 100 نانوفاراد برای فیلتر جریان ورودی استفاده گردید.
6- سلف
از 2 عدد سلف 10 میکروهانری برای فیلتر تبدیلکننده دیجیتال مورد استفاده قرار گرفت.
7- ال.ای.دی (LED)
در این تحقیق به تعداد 2 عدد LED برای ولتاژ خروجی، 2 عدد برای آماده به کار بودن GPS و دستگاه، همچنین یک عدد برای ارسال سیگنال مورد استفاده قرار گرفت.
8- سنسورها
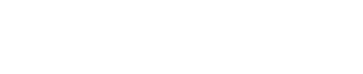
از حسگرهای متفاوتی در این دستگاه استفاده شده است. سنسور LM75 برای تشخیص دما توسط با باس TWI و دقت 5/0 درجه، سنسور SMT160 برای تشخیص دما با دقت 1 درجه که در شکل 4 آمده است استفاده گردید. همچنین سنسور GPS با شماره فنی GPS01_XN934A برای تشخیص سرعت، زمان و مکانیابی و غیره که توسط ماهواره GPS کار میکند استفاده گردید. در شکل 5 نمونهای از آن نشان داده شده است. سنسور شتاب سه محوره و با مشخصات ADXL330 با خروجی آنالوگ بوده و توسط میکروکنترلر تشخیص داده میشود نیز در سیستم آمده است.
حسگر استاندارد فلکسیوفورس A201 نیز برای سنجش فشار آمده بر روی کف پا از پنجه به پاشنه میباشد که نتایج آن در غالب داده و نمودار بیان میگردد و یک نمونه از آن در شکل 6 آمده است.
9- ماژول HMTR
در این دستگاه از دو عدد ماژول HMTR برای بیسیم کردن دستگاه استفاده شد. این ماژول میتواند با سرعت 9600 بی.پی.اس (bps) با حداکثر برد 300 متر اطلاعات را ارسال و دریافت کند. یک نمونه از این ماژول در شکل 7 آمده است.

10- مبدل USB
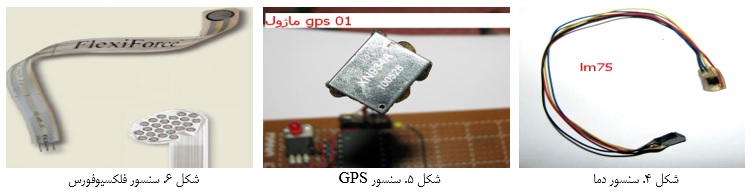
مبدل USB به سریال برای ارتباط ماژول HMTR به رایانه تهیه گردید (شکل 8) تا امکان خرج دادهها به این روش نیز مهیا گردد. در شکل 9 چگونگی ارتباط قطعات این سختافزار و تعامل آن با همدیگر در برد به نمایش گذاشته شده است.
نتایج
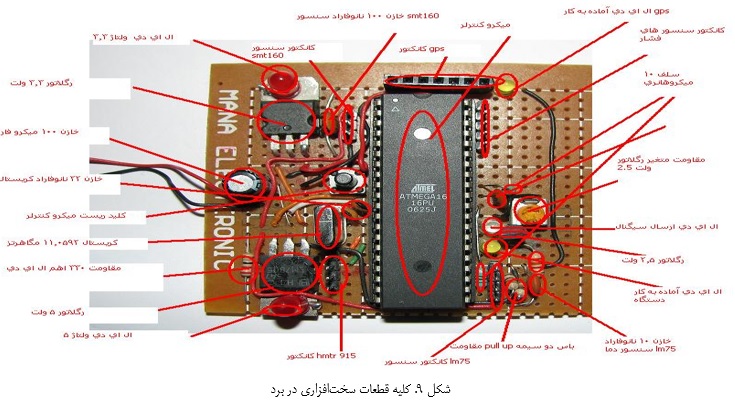
از نرمافزار برنامهنویسی پیشرفته C جهت ترسیم نمودار و ارائه کمی متغیرهای پژوهشی ناشی از سنسورهای و تحلیل یافتههای ناشی از آن استفاده گردید. این سامانه همچنین میتوان به تهیه نمودار، ذخیرهسازی و تجزیه و تحلیل دادهها بپردازد. قابلیتهای دیگری پیشنهادی دیگر تولید کفشهای مناسب نسبت به وزن برای پای افراد، ایجاد برنامهریزی برای ورزشهای مختلف، تشخیص بیماریهایی نظیر صافی کف پا، کمردرد و راهکارهایی برای درمان آنان در نیز میتوان در نظر گرفت. در شکل 10 شمای کلی از نرمافزار و پارامترهای مورد مطالعه ارائه شده است.
همچنین در شکل 11 چگونگی عملکرد سنسورهای متفاوت به کار رفته در کفش در غالب عدد و نمودار نمایش داده شده است.
بحث
کمیسازی از مهمترین اولویتهای مباحث علومورزشی و خاص بیومکانیکی ورزشی است. جهت پیشرفت در مهارتهای ورزشی بررسی دقیق و فنی الگوی حرکت نیز از عناصر اصلی توسعه در یک رشته ورزشی و بهویژه در رقابتها میباشد. توجه به مهارتها و الگوی انجام آن مهارت و همچنین چگونگی انجام دقیق حرکت از مهمترین دغدغههای یک متخصص و مربی ورزش میباشد. ازاینرو تحقیق حاضر به کمیسازی برخی از ابعاد مهم کینتیکی و کینماتیکی در پا با استفاده از کفش هوشمند ورزشی-پزشکی پرداخت. ﮐﻔﺶ بهعنوان یک ابزار خیلی مهم ﻧﻘﺶ اصلی در الگوی ﮔﺎم مناسب، حمایت از اندام تحتانی و توزیع مناسب فشار به همراه دارد. ﺗﻐﯿﯿﺮات در ﻃﺮاﺣﯽ ﮐﻔﺶ میتواند ﺗﻐﯿﯿﺮ قابلتوجهی در ﭘﺎراﻣﺘﺮﻫﺎی ﺑﯿﻮﻣﮑﺎﻧﯿﮑﯽ ﭘﺎ ایﺠﺎد ﻧﻤﺎیﺪ. ﺑﻪ ایﻦ ﻣﻨﻈﻮر ﺗﻮﻟﯿﺪﮐﻨﻨﺪﮔﺎن ﮐﻔﺶ ﺗﻐﯿﯿﺮات ﻣﺨﺘﻠﻔﯽ بهویژه در کف و پاشنه ﺑﻪوﺟﻮد آوردند تا نیروی وارده به مفاصل و عضلات بهصورت متعادل توزیع گردد. همچنین افزایش دقت، سرعت، شتاب و تغییرات جابهجایی برای بهبود رکورد و شرکت در رقابتها بدون آسیب از دیگر موارد مهم در این حوزه میباشد. با ﺗﻮﺟﻪ ﺑﻪ ایﻨﮑﻪ اﻓﺮاد ﻏﺎﻟﺒﺎً ﺑﺎ اﻟﮕﻮی ﭘﺎﺷﻨﻪ-ﭘﻨﺠﻪ راه میروند، ﭘﺎﺷﻨﻪ ﺑﺎ لایههای ﮐﻤﺘﺮی ﻧﺴﺒﺖ ﺑﻪ ﻃﺮاﺣﯽ رایﺞ کفشهای اﺳﺘﺎﻧﺪارد ﻣﻮاﺟﻪ ﺷﺪه و ﻧﯿﺮوی ﻋﻤﻮدی و ﻓﺸﺎر وارد ﺑﺮ ﭘﺎﺷﻨﻪ اﻓﺰایﺶیﺎﻓﺘﻪ اﺳﺖ (13). ﻋﻼوه ﺑﺮ ایﻦ، در ﻧﺎﺣﯿﻪ ﻣﯿﺎﻧﯽ و ﺟﻠﻮیﯽ ﻧﯿﺰ ﻓﺸﺎر در ﮐﻔﺶ ﻧﺎﭘﺎیﺪار اﻓﺰایﺶ مییابد که اندازهگیری این مقدار فشار بهویژه در شرایط میدانی برای ورزش قهرمانی نیز بسیار مهم میباشد. اﻓﺰایﺶ ﻓﺸﺎر در ﻧﻮاﺣﯽ سهگانه ﮐﻒﭘﺎیﯽ، ﻣﯽﺗﻮاﻧﺪ در ارﺗﺒﺎط ﺑا ﺳﻔﺘﯽ و ﺧﺎﺻﯿﺖ ﺟﺬﺑﯽ ﮐﻢ ﺗﺨﺖ و زیﺮه در ﮐﻔﺶ باشد. ایﻦ نیروهای ﻏﯿﺮﻃﺒﯿﻌﯽ ﺑﺎ ﮔﺬﺷﺖ زﻣﺎن زﻣﯿﻨﻪی ایﺠﺎد آﺳﯿﺐ در ﻧﺎﺣﯿﻪ ﮐﻒ ﭘﺎ را ﻓﺮاﻫﻢ ﻣﯽﮐﻨﻨﺪ (خود مقاله). ﻧﺘﺎیﺞ ﭘﮋوﻫﺶ اﺳﺘﻮارت و ﻫﻤﮑﺎران ﺑﺮﺧﻼف ایﻦ یﺎﻓﺘﻪ ﻣﯽﺑﺎﺷﺪ (14). دلیل اختلاف در این تحقیق را میتوان به ابزار اندازهگیری متفاوت دو پژوهش اشاره کرد. وجود روایی بالا و کالیبره بوده دستگاه در نتایج آن بسیار تأثیرگذار است. ﻣﺤﻘﻘﯿﻦ ﻓﺸﺎر و نیرو وارده را ﺑﯿﻦ ﮐﻒ ﭘﺎ و ﮐﻒ داﺧﻠﯽ ﮐﻔﺶ را ﺑﺎ اﺳﺘﻔﺎده از دﺳﺘﮕﺎه ﺗﻮ ﮐﻔﺸﯽ پد دار اﻧﺪازهﮔﯿﺮی ﮐﺮدﻧﺪ اﻣﺎ در ﺗﺤﻘﯿﻖ گندمکار و همکاران نیروی وارد ﺑﯿﻦ ﮐﻒ زیﺮیﻦ ﮐﻔﺶ و زﻣﯿﻦ ﺑﺎ اﺳﺘﻔﺎده از دﺳﺘﮕﺎه ﻓﻮت اﺳﮑﻦ اﻧﺪازهﮔﯿﺮی ﺷﺪه اﺳﺖ (15). ﺻﺎﻓﯽ ﮐﻒ ﭘﺎ ﺑﺎ ﺗﻐﯿیر در عوامل ﺟﺬب ﺷﻮک ﺑﺎ اﻓﺰایﺶ نیرو ﺑﻪویﮋه در ﻧﻮاﺣﯽ ﻋﻘﺐ و ﻣﯿﺎﻧﯽ ﮐﻒ ﭘﺎ بهﻫﻤﺮاه اﺳﺖ (17-16).
اراﺋﻪ روشﻫﺎیﯽ ﻣﻄﻠﻮب ﺟﻬﺖ ﮐﺎﻫﺶ و ﺑﻬﯿﻨﻪﺳﺎزی ﻧﯿﺮوﻫﺎی اﻋﻤﺎﻟﯽ ﺑﻪ ایﻦ ﻧﻮاﺣﯽ و ﺑﻪﺗﺒﻊ آن ﺗﺼﺤﯿﺢ ﻓﺸﺎر وارده ﻣﯽﺗﻮاﻧﺪ ﮐﺎرایﯽ و ﻋﻤﻠﮑﺮد ﭘﺎ را اﻓﺰایﺶ داده و ﻣﻨﺠﺮ ﺑﻪ ﺑﻬﺒﻮد وﺿﻌﯿﺖ در ایﻦ اﻓﺮاد ﮔﺮدد. در ایﻦ ﺗﺤﻘﯿﻖ ﻣﺎ ﺑﻪ دﻧﺒﺎل ایﻦ ﺑﻮدیﻢ ﺗﺎ ﺑﺮ اﺳﺎس اطلاعات ناشی از پروژه در ﻧﯿﺮوﻫﺎی اﻋﻤﺎﻟﯽ و دیگر متغیرها، ﺑه ارزیﺎﺑﯽ یک ﻧﻮع هوشمندی از ﮐﻔﺶﻫﺎ، ﺑﺮای اﻓﺮاد ﺑﺎ ﺻﺎﻓﯽ ﮐﻒ و دیگر فرضهای آن پرداخته شود. ﻧﯿﺮوﻫﺎی ﺑﺮﺧﻮردی ﺑﻪﻋﻨﻮان یﮑﯽ از ﻣﻬﻢﺗﺮیﻦ ﻋﻮاﻣﻞ ایﺠﺎد و ﺗﻮﺳﻌﻪ آﺳﯿﺐ ﻧﺎﺣﯿﻪای ﭘﺎ و ﺟﺪایﯽ اﻓﺮاد از ﻓﻌﺎﻟﯿﺖ ﺑﺪﻧﯽ ﻣﺤﺴﻮب ﻣﯽﺷﻮد (18). درواﻗﻊ ﮐﺎﻫﺶ ایﻦ ﻧﯿﺮوﻫﺎ ﺑﻪویﮋه ﻧﯿﺮوی ﻋﻤﻮدی، ﻫﻤﺎن ﻫﺪﻓﯽ اﺳﺖ ﮐﻪ ﮐﻔﺶﻫﺎی هوشمند ﺑﺮای آن ﻃﺮاﺣﯽ ﺷﺪه¬اﻧﺪ. اﻓﺰایﺶ ایﻦ ﻓﺸﺎرﻫﺎی اﺿﺎﻓﯽ ﺑﺎ ﮔﺬﺷﺖ زﻣﺎن ﻃﯽ ﺑﺮﺧﻮردﻫﺎی ﺗﮑﺮاری ﺣﯿﻦ راه رﻓﺘﻦ، زﻣﯿﻨﻪ ایﺠﺎد و ﺗﻮﺳﻌﻪی آﺳﯿﺐ در ﻧﺎﺣﯿﻪ ﮐﻒ ﭘﺎ را ﻓﺮاﻫﻢ ﻣﯽﮐﻨﺪ؛ ﺑﻨﺎﺑﺮایﻦ، ﻧﺘﺎیﺞ ﺑﻪ ﻧﺎﮐﺎرآﻣﺪی ایﻦ ﮐﻔﺶﻫﺎ در ﺗﻌﺪیﻞ ﻓﺸﺎر ﮐﻒﭘﺎیﯽ در اﻓﺮاد ﺑﺎ ﺻﺎﻓﯽ ﮐﻒ ﭘﺎ اﺷﺎره دارد.
نتیجه گیری نهایی
این کفش میتواند با کمیسازی اطلاعات کیفی به پیشرفت نتایج ورزشکار و همچنین در برخی از آسیبهای کف پا در کنار دیگر تجهیزات کمک نماید.
ملاحظات اخلاقی
پیروی از اصول اخلاق پژوهش
اصول اخلاق تماماً در این مقاله رعایت شده است. شرکت کنندگان اجازه داشتند هر زمان که مایل بودند از پژوهش خارج شوند. همچنین همه شرکت کنندگان در جریان روند پژوهش بودند. اطلاعات آنها محرمانه نگه داشته شد.
حامی مالی
این پژوهش هیچ گونه کمک مالی از سازمان های دولتی، خصوصی و غیر انتفاعی دریافت نکرده است.
مشارکت نویسندگان
تمام نویسندگان در طراحی، اجرا و نگارش همه بخشهای پژوهش حاضر مشارکت داشتهاند.
تعارض
بنابر اظهار نویسندگان، این مقاله تعارض منافع ندارد.
پا مهمترین اندام ﺗﻌﺎﻣﻞ زﻣﯿﻦ و ﺑﺪن در اﻧﺴﺎن میباشد. ﺳﺎﺧﺘﺎر ﻋﻤﻠﮑﺮدی آن ﺑﺮ اﻟﮕﻮی راه رﻓﺘﻦ بسیار تاثیرگذار میباشد (2-1). ﻫﺮﮔﻮﻧﻪ اﻧﺤﺮاف در ﭘﺎﻫﺎ اﺛﺮ ﺧﻮد را بهترتیب ﺑﻪ ﻣﻔﺎﺻﻞ و اﻧﺪامﻫﺎی ﺑﺎﻻﺗﺮ منتقل میکند. تغییر و جابهجایی در ساختار آناتومی و اﺳﺘﺨﻮانهای ﭘﺎ منجر به حرکت ﻏﯿﺮﻃﺒﯿﻌﯽ ﭘﺎ ﻫﻨﮕﺎم راه رﻓﺘﻦ ﻣﯽﺷﻮد. از ایﻦرو، ﺑﺮوز ﻧﺎﻫﻨﺠﺎری در ایﻦ بخش ﺑﻪ ﻟﺤﺎظ ﺑﯿﻮﻣﮑﺎﻧﯿﮑﯽ اﻫﻤﯿﺖ ویژهای را به هم راه دارد (2). در همین راستا ﮐﻔﺶ ﺑﻪﻋﻨﻮان یک ابزار ضروری و خیلی مهم ﻧﻘﺶ بسزایی در گام ﺑﺮداری ﺑﻬﯿﻨﻪ و حمایت از اندام تحتانی به همراه دارد. ﺗﺤﻘﯿﻘﺎت ﻧﺸﺎن ﻣﯽدﻫﻨﺪ ﮐﻪ ﻃﺮاﺣﯽ مناسب ﮐﻔﺶ ﻣﯽﺗﻮاﻧﺪ ﺗﻐﯿﯿﺮ ﻗﺎﺑﻞﺗﻮﺟﻬﯽ در ﭘﺎراﻣﺘﺮﻫﺎی ﺑﯿﻮﻣﮑﺎﻧﯿﮑﯽ ﭘﺎ ایﺠﺎد ﻧﻤﺎیﺪ. ﺑﻪ ایﻦ ﻣﻨﻈﻮر ﺗﻮﻟﯿﺪﮐﻨﻨﺪﮔﺎن ﮐﻔﺶ ﺗﻐﯿﯿﺮات ﻣﺨﺘﻠﻔﯽ را در آن ﺑﻪوﺟﻮد میآوردند تا در مکانیک حرکت انسان مناسب باشد. لذا توجه به نوعآوریهای جدید در این بخش بسیار ضروری بوده و نیازمند تحقیقات بیشتری از محققین میباشد. فنآوری در دنیا از مهمترین ابزار پیشرفت، جلوگیری از آسیب و بازتوانی ورزشکاران بهشمار میآید. در تأمین ایمنی اندازهگیری و ارزیابی فنون و مهارتهای ورزشی و به دنبال آن بالا بردن همهجانبه سطوح عملکردی، بهویژه در رقابتهای ورزشی ورزشکاران که پیشرو میباشد، همگام با توسعه تکنولوژی و فنآوری در حوزه ورزش، همچنین ساخت تجهیزات مورد توجه قرار گرفته است (3). حوزه تحقیقات کاربردی در بیومکانیک در ارتباط با مسائل پایهای و مبنایی برای درک بهتر مفاهیم موجود و علت پردازی علم در اجرا است. در این حوزه محققان گوناگونی از جمله متخصصان بیومکانیک، مهندسین ورزشی، ریاضیدانان، زیست شناسان و غیره به توصیف کیفی، کمیسازی و طبقهبندی حرکت ناشی از عملکرد بدن انسان میپردازند که از اصلیترین روشهای بررسی ابعاد مکانیکی حرکات در تمرین روش توصیفی و کمی آن میباشد. در روش توصیفی، ابعاد یک پدیده توصیف میگردد، اما در روش کمی، به تجزیه و تحلیل مهارت یا حرکت با استفاده از عدد مورد توجه قرار میگیرد. به کمیت درآوردن مهارت یا فن حرکتی ضمن افزایش دقت در درک چگونگی و ابعاد حرکت، کیفیت توصیف پدیدهها را نیز بالا میبرد. به جهت تبدیل مهارتهای حرکتی و فنون به کمیت، روشهای فنآورانه متفاوتی وجود دارد که برخی از این تحلیلها که با استفاده از پردازش تصویری و تجهیزات آزمایشگاهی با هزینه زیاد و در محیط غیر میدانی صورت میپذیرد. آنالیز حرکات به دانش بررسی و مطالعه نحوه حرکت حیوانات و بهطور تخصصیتر نحوه حرکت انسان با استفاده از ابزارهای سنجش و اندازهگیری حرکت بدن، مکانیک بدن و فعالیت عضلات بدن و همچنین چشم و مغز مشاهدهکننده، گفته شود. آنالیز حرکت برای ارزیابی، برنامهریزی و درمان نحوه حرکت افراد و بهخصوص افراد آسیبدیده به کار میرود. همچنین از این علم در بیومکانیک ورزشی برای کمک به ورزشکاران جهت بهتر و مؤثرتر دویدن استفاده میشود. دانشمندانی مانند آریستول و جووانو آلفونسو بورلی در زمانهای گذشته به آنالیز علمی حرکت بدن علاقهمند بودند. در قرن نوزدهم پژوهشگرانی مانند کریستین ویلهلم بران به همراه اتو فیشر مجموعهای از تحقیقات علمی خود در خصوص بیومکانیک حرکت انسان را منتشر کردند. در ادامه با پیشرفت فنآوری و IT ورزشی تصویربرداری و ضبط فیلم میسر گردید تا بهواسطه آن روند حرکت در انسان بهصورت دوبعدی و سهبعدی میسر گردد. این امر به کشف شدن برخی از زوایای پنهان بیومکانیک حرکت انسان منجر شد که تا پیش از آن زمان، فهم با چشم غیرمسلح امکانپذیر نبود. ادوارد میبریج و ژولز ماری از محققین استفاده از این روش در آنالیز حرکت انسان بودند. تولید علم و کشف حقایق جدید در بسیاری از حیطهها ملزم به همراه داشتن ابزار اندازهگیری دقیق میباشد. امروزه بررسی و شناخت دقیق حرکات انسان همچون راه رفتن، ایستادن، وضعیت قوس کف پا، ارتوپدی جهت بررسی پروتزهای جایگزین، فیزیوتراپی مفاصل آسیبدیده و تحلیل حرکات ورزشی، ضروری است (4). محاسبات کینماتیک در ورزش به اشکال متفاوتی انجام میگردد که گونیامتری و شتابسنجی از اشکال پرکاربرد آن میباشد که برخی پارامترهای مهم کینماتیک حرکت را بهطور مستقیم محاسبه میکنند. پرتابل بودن، قابلیت انتقال سریع اطلاعات به رایانه و قیمت نهچندان زیاد این وسایل، برخی از مزایای این سبک تحقیقاتی میباشد (5). در سالیان اخیر، نسخههایی از حسگرهای ماتریکسی و مغناطیسی ارائه شد که بدون تصویربرداری به بررسی، پارامترهای کینماتیکی و همچنین کینتیکی در اندازهگیری پرداخته است (7-6). مشکل اصلی برخی از این دستگاههای مشابه محدودیت حرکتی در عملکرد و اجرای میدانی ورزشکاران میباشد. استفاده از حسگرهای تعبیهشده در بدن مانند کفش و میدانی بودن آن توانست تا حدودی این محدودیتها را کاهش دهد (8). گفتنی است الگوسازی حرکت انسان و استفاده از دستگاههایی که نیازی به نشانگر نداشتند، روشها دیگری برای تحلیل حرکت بودند که البته هرکدام با محدودیتهایی همراه بودند. امروزه روشهای رایج برای محاسبه ابعاد حرکتی استفاده از تکنیک تصویربرداری و الگوریتم پردازش تصویر و استفاده از نیروسنجهای متفاوت و حسگرها یا اشکال متفاوتی از فورس¬پلیتها در سینتیک میباشد. دقت مطلوب، قابلیت پردازش در لحظه و نداشتن محدودیت حرکتی برای کاربر توسط نشانگرها از مزایایی دستگاههای مشابه میباشد. این دستگاه از دو بخش سختافزاری و نرمافزاری تشکیل شده که میتواند به توصیف پارامترهای بیان شده بپردازد. در بخش توصیف حرکت زمان، سرعت، شتاب و مکان مورد بررسی قرار میگیرد و در بخش کینتیکی بررسی نیروی حرکتی از پنجه تا پاشنه مورد توجه قرار میگیرد. بخشی از اجزای سختافزاری این دستگاه عبارتاند از میکروکنترلر، رگلاتورها، کریستال، مقاومتها، خازنها، سلف، ال.ای.دی، سنسورها، ماژول، مبدل و بخش نرمافزاری این دستگاه با زبان برنامهنویسی پیشرفته C انجام پذیرفت. از دستگاههای متفاوتی برای اندازهگیری فشار وارده بر کف پا در پژوهشهای متفاوت استفاده شده است. دﺳﺘﮕﺎه ﻓﻮت اﺳﮑﻦ (ﻣﺪل RSscan ﺑﻪ اﺑﻌﺎد 4/0×1 ﻣﺘﺮ ﺳﺎﺧﺖ ﮐﺸﻮر ﺑﻠﮋیﮏ) ازجمله این موارد میباشد. ایﻦ دﺳﺘﮕﺎه در وﺳﻂ ﻣﺴﯿﺮ راه رﻓﺘﻦ ﺑﻪﮔﻮﻧﻪای ﺟﺎیﮔﺬاری میشود ﮐﻪ آزﻣﻮدﻧﯽﻫﺎ ﻗﺎدر ﺑﻪ ﺗﺸﺨﯿﺺ فشارِ وارده میباشند (9). همچنین دستگاه رایج صفحه نیرو یکی از رایجترین دستگاههای جهت بررسی مقادیر متفاوتی از نیروی اعمالشده در راستاهای متفاوت است که بیشتر آزمایشگاهی بوده و کاربرد میدانی کمتری نسبت به کفش هوشمند دارد (10). در تحقیق فوق بررسی تغییرات نیروی وارده در استارتهایی مانند دو و نیروی وارده از پنجه به سمت پاشنه بهواسطه فلکسیوفورسها جهت بررسی آسیبهای احتمالی و دیگر موارد مورد بررسی قرار میگیرد. همچنین امکان بررسی شتاب، تغییرات مکانی و زمانی برای مربی و ورزشکار جهت تجزیه و تحلیل حرکتی ایجاد میگردد. بعد کالیبراسیون دستگاه میتوان بهعنوان یک ابزار پژوهشی در اختیار کلیه دانشگاهها، پژوهشکدهها، فدراسیونها و دانشجویان علاقهمند در حوزه فنآوری ورزشی قرار گیرد. قابلیت بررسی دقیق حرکتی و فیدبک مثبت امکان ثبت رکورد بهتر در مسابقات قهرمانی بهواسطه این دستگاه امکانپذیر خواهد بود و بهعنوان یک ابزار تحقیق مناسب جهت تشخیص و افتراق اختلاف نیروی در افراد داری کف پای صاف که شایعترین عارضه اندام تحتانی بوده (12-11) پرداخته و به کمیسیون پزشکی نیروی انتظامی در معافیت از رزم یا سربازی کمک میکنند. از اینرو بهدلایل فوق محقق این دستگاه را ابداع و ثبت کرد تا بتواند گام مثبتی در این حوزه برداشته شود.
روش شناسی
در این مرحله ورزشکار کفش را پوشیده و تجهیزات را به کمر و پای خود با کش محکم بسته و مورد حمایت قرار میدهد. ماژولهای ارسال و دریافت اطلاعات نیز در حین شروع تمرین روش میشود. فرد در حین انجام تمرین در آزمایشگاه و بهویژه در شرایط میدانی این کفش را پوشیده و با روشن شدن دستگاه اطلاعاتی مانند مکان، زمان، شتاب و نیروی وارده به نرمافزار محققساخته در رایانه وارد میشود. مربی یا محقق هم میتواند در فاصلۀ حداکثر 300 متر با توجه به قابلیت ماژول اطلاعات را دریافت کرده و تجزیه تحلیل نماید. در شکل 1 نمونه آزمایشگاهی این کفش به نمایش گذاشته شده است. این طرح به گواهی شماره 74929 مورخ 17/2/1391 به نام نویسنده مقاله اختراع و به ثبت اداره مالکیتهای صنعتی ایران رسیده است.
اجزای سختافزاری کفش
1- میکروکنترلر
این بخش از شرکت ATMEL و با سرعت 16 Mips و فرکانس 16 MHz خریداری گردید. این بخش سختافزاری دارای حافظه 16 kb با قابلیت 10.000 نوشتن و پاک کردن را به همراه داشت که در شکل 2 نشان داده شده است.
2- رگلاتورها
از رگلاتور LM 7805 برای ولتاژ 5 ولت، رگلاتور LF 33CV برای ولتاژ 3/3 ولت و رگلاتور LM 336 برای ولتاژ 5/2 ولت تبدیلکننده آنالگ به دیجیتال استفاده شد که در شکل 3 نشان داده شده است.
3- کریستال
از کریستال 05/11 مگاهرتز برای تأمین فرکانس میکروکنترلر استفاده شد.
4- مقاومتها
مقاومت بهکاررفته در این فنآوری 330 اهم میباشد که برای تأمین جریانLED های نشاندهنده ولتاژ خروجی و تأمین جریان LED نمایشگر آماده بهکار بودن سیستم، مقاومت 10 کیلواهمی متغیر برای تغییر سطح ولتاژ رگولاتور LM 336 و 2 عدد مقاومت 10 اهم برای Pull up کردن باس TWI مورد استفاده قرار گرفت.
5- خازنها
در این پروژه از 2 عدد خازن 22 نانوفاراد برای کریستال، خازن 100 نانوفاراد برای فیلترینگ سنسور دما SMT160، خازن 10 نانوفاراد برای فیلترینگ سنسور دما LM75، خازن 100 نانوفاراد برای فیلتر تبدیلکننده آنالوگ به دیجیتال و خازن 100 نانوفاراد برای فیلتر جریان ورودی استفاده گردید.
6- سلف
از 2 عدد سلف 10 میکروهانری برای فیلتر تبدیلکننده دیجیتال مورد استفاده قرار گرفت.
7- ال.ای.دی (LED)
در این تحقیق به تعداد 2 عدد LED برای ولتاژ خروجی، 2 عدد برای آماده به کار بودن GPS و دستگاه، همچنین یک عدد برای ارسال سیگنال مورد استفاده قرار گرفت.
8- سنسورها
از حسگرهای متفاوتی در این دستگاه استفاده شده است. سنسور LM75 برای تشخیص دما توسط با باس TWI و دقت 5/0 درجه، سنسور SMT160 برای تشخیص دما با دقت 1 درجه که در شکل 4 آمده است استفاده گردید. همچنین سنسور GPS با شماره فنی GPS01_XN934A برای تشخیص سرعت، زمان و مکانیابی و غیره که توسط ماهواره GPS کار میکند استفاده گردید. در شکل 5 نمونهای از آن نشان داده شده است. سنسور شتاب سه محوره و با مشخصات ADXL330 با خروجی آنالوگ بوده و توسط میکروکنترلر تشخیص داده میشود نیز در سیستم آمده است.
حسگر استاندارد فلکسیوفورس A201 نیز برای سنجش فشار آمده بر روی کف پا از پنجه به پاشنه میباشد که نتایج آن در غالب داده و نمودار بیان میگردد و یک نمونه از آن در شکل 6 آمده است.
9- ماژول HMTR
در این دستگاه از دو عدد ماژول HMTR برای بیسیم کردن دستگاه استفاده شد. این ماژول میتواند با سرعت 9600 بی.پی.اس (bps) با حداکثر برد 300 متر اطلاعات را ارسال و دریافت کند. یک نمونه از این ماژول در شکل 7 آمده است.
10- مبدل USB
مبدل USB به سریال برای ارتباط ماژول HMTR به رایانه تهیه گردید (شکل 8) تا امکان خرج دادهها به این روش نیز مهیا گردد. در شکل 9 چگونگی ارتباط قطعات این سختافزار و تعامل آن با همدیگر در برد به نمایش گذاشته شده است.
نتایج
از نرمافزار برنامهنویسی پیشرفته C جهت ترسیم نمودار و ارائه کمی متغیرهای پژوهشی ناشی از سنسورهای و تحلیل یافتههای ناشی از آن استفاده گردید. این سامانه همچنین میتوان به تهیه نمودار، ذخیرهسازی و تجزیه و تحلیل دادهها بپردازد. قابلیتهای دیگری پیشنهادی دیگر تولید کفشهای مناسب نسبت به وزن برای پای افراد، ایجاد برنامهریزی برای ورزشهای مختلف، تشخیص بیماریهایی نظیر صافی کف پا، کمردرد و راهکارهایی برای درمان آنان در نیز میتوان در نظر گرفت. در شکل 10 شمای کلی از نرمافزار و پارامترهای مورد مطالعه ارائه شده است.
همچنین در شکل 11 چگونگی عملکرد سنسورهای متفاوت به کار رفته در کفش در غالب عدد و نمودار نمایش داده شده است.
بحث
کمیسازی از مهمترین اولویتهای مباحث علومورزشی و خاص بیومکانیکی ورزشی است. جهت پیشرفت در مهارتهای ورزشی بررسی دقیق و فنی الگوی حرکت نیز از عناصر اصلی توسعه در یک رشته ورزشی و بهویژه در رقابتها میباشد. توجه به مهارتها و الگوی انجام آن مهارت و همچنین چگونگی انجام دقیق حرکت از مهمترین دغدغههای یک متخصص و مربی ورزش میباشد. ازاینرو تحقیق حاضر به کمیسازی برخی از ابعاد مهم کینتیکی و کینماتیکی در پا با استفاده از کفش هوشمند ورزشی-پزشکی پرداخت. ﮐﻔﺶ بهعنوان یک ابزار خیلی مهم ﻧﻘﺶ اصلی در الگوی ﮔﺎم مناسب، حمایت از اندام تحتانی و توزیع مناسب فشار به همراه دارد. ﺗﻐﯿﯿﺮات در ﻃﺮاﺣﯽ ﮐﻔﺶ میتواند ﺗﻐﯿﯿﺮ قابلتوجهی در ﭘﺎراﻣﺘﺮﻫﺎی ﺑﯿﻮﻣﮑﺎﻧﯿﮑﯽ ﭘﺎ ایﺠﺎد ﻧﻤﺎیﺪ. ﺑﻪ ایﻦ ﻣﻨﻈﻮر ﺗﻮﻟﯿﺪﮐﻨﻨﺪﮔﺎن ﮐﻔﺶ ﺗﻐﯿﯿﺮات ﻣﺨﺘﻠﻔﯽ بهویژه در کف و پاشنه ﺑﻪوﺟﻮد آوردند تا نیروی وارده به مفاصل و عضلات بهصورت متعادل توزیع گردد. همچنین افزایش دقت، سرعت، شتاب و تغییرات جابهجایی برای بهبود رکورد و شرکت در رقابتها بدون آسیب از دیگر موارد مهم در این حوزه میباشد. با ﺗﻮﺟﻪ ﺑﻪ ایﻨﮑﻪ اﻓﺮاد ﻏﺎﻟﺒﺎً ﺑﺎ اﻟﮕﻮی ﭘﺎﺷﻨﻪ-ﭘﻨﺠﻪ راه میروند، ﭘﺎﺷﻨﻪ ﺑﺎ لایههای ﮐﻤﺘﺮی ﻧﺴﺒﺖ ﺑﻪ ﻃﺮاﺣﯽ رایﺞ کفشهای اﺳﺘﺎﻧﺪارد ﻣﻮاﺟﻪ ﺷﺪه و ﻧﯿﺮوی ﻋﻤﻮدی و ﻓﺸﺎر وارد ﺑﺮ ﭘﺎﺷﻨﻪ اﻓﺰایﺶیﺎﻓﺘﻪ اﺳﺖ (13). ﻋﻼوه ﺑﺮ ایﻦ، در ﻧﺎﺣﯿﻪ ﻣﯿﺎﻧﯽ و ﺟﻠﻮیﯽ ﻧﯿﺰ ﻓﺸﺎر در ﮐﻔﺶ ﻧﺎﭘﺎیﺪار اﻓﺰایﺶ مییابد که اندازهگیری این مقدار فشار بهویژه در شرایط میدانی برای ورزش قهرمانی نیز بسیار مهم میباشد. اﻓﺰایﺶ ﻓﺸﺎر در ﻧﻮاﺣﯽ سهگانه ﮐﻒﭘﺎیﯽ، ﻣﯽﺗﻮاﻧﺪ در ارﺗﺒﺎط ﺑا ﺳﻔﺘﯽ و ﺧﺎﺻﯿﺖ ﺟﺬﺑﯽ ﮐﻢ ﺗﺨﺖ و زیﺮه در ﮐﻔﺶ باشد. ایﻦ نیروهای ﻏﯿﺮﻃﺒﯿﻌﯽ ﺑﺎ ﮔﺬﺷﺖ زﻣﺎن زﻣﯿﻨﻪی ایﺠﺎد آﺳﯿﺐ در ﻧﺎﺣﯿﻪ ﮐﻒ ﭘﺎ را ﻓﺮاﻫﻢ ﻣﯽﮐﻨﻨﺪ (خود مقاله). ﻧﺘﺎیﺞ ﭘﮋوﻫﺶ اﺳﺘﻮارت و ﻫﻤﮑﺎران ﺑﺮﺧﻼف ایﻦ یﺎﻓﺘﻪ ﻣﯽﺑﺎﺷﺪ (14). دلیل اختلاف در این تحقیق را میتوان به ابزار اندازهگیری متفاوت دو پژوهش اشاره کرد. وجود روایی بالا و کالیبره بوده دستگاه در نتایج آن بسیار تأثیرگذار است. ﻣﺤﻘﻘﯿﻦ ﻓﺸﺎر و نیرو وارده را ﺑﯿﻦ ﮐﻒ ﭘﺎ و ﮐﻒ داﺧﻠﯽ ﮐﻔﺶ را ﺑﺎ اﺳﺘﻔﺎده از دﺳﺘﮕﺎه ﺗﻮ ﮐﻔﺸﯽ پد دار اﻧﺪازهﮔﯿﺮی ﮐﺮدﻧﺪ اﻣﺎ در ﺗﺤﻘﯿﻖ گندمکار و همکاران نیروی وارد ﺑﯿﻦ ﮐﻒ زیﺮیﻦ ﮐﻔﺶ و زﻣﯿﻦ ﺑﺎ اﺳﺘﻔﺎده از دﺳﺘﮕﺎه ﻓﻮت اﺳﮑﻦ اﻧﺪازهﮔﯿﺮی ﺷﺪه اﺳﺖ (15). ﺻﺎﻓﯽ ﮐﻒ ﭘﺎ ﺑﺎ ﺗﻐﯿیر در عوامل ﺟﺬب ﺷﻮک ﺑﺎ اﻓﺰایﺶ نیرو ﺑﻪویﮋه در ﻧﻮاﺣﯽ ﻋﻘﺐ و ﻣﯿﺎﻧﯽ ﮐﻒ ﭘﺎ بهﻫﻤﺮاه اﺳﺖ (17-16).
اراﺋﻪ روشﻫﺎیﯽ ﻣﻄﻠﻮب ﺟﻬﺖ ﮐﺎﻫﺶ و ﺑﻬﯿﻨﻪﺳﺎزی ﻧﯿﺮوﻫﺎی اﻋﻤﺎﻟﯽ ﺑﻪ ایﻦ ﻧﻮاﺣﯽ و ﺑﻪﺗﺒﻊ آن ﺗﺼﺤﯿﺢ ﻓﺸﺎر وارده ﻣﯽﺗﻮاﻧﺪ ﮐﺎرایﯽ و ﻋﻤﻠﮑﺮد ﭘﺎ را اﻓﺰایﺶ داده و ﻣﻨﺠﺮ ﺑﻪ ﺑﻬﺒﻮد وﺿﻌﯿﺖ در ایﻦ اﻓﺮاد ﮔﺮدد. در ایﻦ ﺗﺤﻘﯿﻖ ﻣﺎ ﺑﻪ دﻧﺒﺎل ایﻦ ﺑﻮدیﻢ ﺗﺎ ﺑﺮ اﺳﺎس اطلاعات ناشی از پروژه در ﻧﯿﺮوﻫﺎی اﻋﻤﺎﻟﯽ و دیگر متغیرها، ﺑه ارزیﺎﺑﯽ یک ﻧﻮع هوشمندی از ﮐﻔﺶﻫﺎ، ﺑﺮای اﻓﺮاد ﺑﺎ ﺻﺎﻓﯽ ﮐﻒ و دیگر فرضهای آن پرداخته شود. ﻧﯿﺮوﻫﺎی ﺑﺮﺧﻮردی ﺑﻪﻋﻨﻮان یﮑﯽ از ﻣﻬﻢﺗﺮیﻦ ﻋﻮاﻣﻞ ایﺠﺎد و ﺗﻮﺳﻌﻪ آﺳﯿﺐ ﻧﺎﺣﯿﻪای ﭘﺎ و ﺟﺪایﯽ اﻓﺮاد از ﻓﻌﺎﻟﯿﺖ ﺑﺪﻧﯽ ﻣﺤﺴﻮب ﻣﯽﺷﻮد (18). درواﻗﻊ ﮐﺎﻫﺶ ایﻦ ﻧﯿﺮوﻫﺎ ﺑﻪویﮋه ﻧﯿﺮوی ﻋﻤﻮدی، ﻫﻤﺎن ﻫﺪﻓﯽ اﺳﺖ ﮐﻪ ﮐﻔﺶﻫﺎی هوشمند ﺑﺮای آن ﻃﺮاﺣﯽ ﺷﺪه¬اﻧﺪ. اﻓﺰایﺶ ایﻦ ﻓﺸﺎرﻫﺎی اﺿﺎﻓﯽ ﺑﺎ ﮔﺬﺷﺖ زﻣﺎن ﻃﯽ ﺑﺮﺧﻮردﻫﺎی ﺗﮑﺮاری ﺣﯿﻦ راه رﻓﺘﻦ، زﻣﯿﻨﻪ ایﺠﺎد و ﺗﻮﺳﻌﻪی آﺳﯿﺐ در ﻧﺎﺣﯿﻪ ﮐﻒ ﭘﺎ را ﻓﺮاﻫﻢ ﻣﯽﮐﻨﺪ؛ ﺑﻨﺎﺑﺮایﻦ، ﻧﺘﺎیﺞ ﺑﻪ ﻧﺎﮐﺎرآﻣﺪی ایﻦ ﮐﻔﺶﻫﺎ در ﺗﻌﺪیﻞ ﻓﺸﺎر ﮐﻒﭘﺎیﯽ در اﻓﺮاد ﺑﺎ ﺻﺎﻓﯽ ﮐﻒ ﭘﺎ اﺷﺎره دارد.
نتیجه گیری نهایی
این کفش میتواند با کمیسازی اطلاعات کیفی به پیشرفت نتایج ورزشکار و همچنین در برخی از آسیبهای کف پا در کنار دیگر تجهیزات کمک نماید.
ملاحظات اخلاقی
پیروی از اصول اخلاق پژوهش
اصول اخلاق تماماً در این مقاله رعایت شده است. شرکت کنندگان اجازه داشتند هر زمان که مایل بودند از پژوهش خارج شوند. همچنین همه شرکت کنندگان در جریان روند پژوهش بودند. اطلاعات آنها محرمانه نگه داشته شد.
حامی مالی
این پژوهش هیچ گونه کمک مالی از سازمان های دولتی، خصوصی و غیر انتفاعی دریافت نکرده است.
مشارکت نویسندگان
تمام نویسندگان در طراحی، اجرا و نگارش همه بخشهای پژوهش حاضر مشارکت داشتهاند.
تعارض
بنابر اظهار نویسندگان، این مقاله تعارض منافع ندارد.
فهرست منابع
1. Ledoux WR, Hillstrom HJ. The distributed plantar vertical force of neutrally aligned and pes planus feet. Gait & posture. 2002;15(1):1-9. [DOI:10.1016/S0966-6362(01)00165-5] [PMID]
2. Zifchock RA, Davis I. A comparison of semi-custom and custom foot orthotic devices in high-and low-arched individuals during walking. Clinical biomechanics. 2008;23(10): 1287. [DOI:10.1016/j.clinbiomech.2008.07.008] [PMID]
3. Hafezi H.S. M., Banai A. Design and fabrication of three axes accelerometer, Research in Sport Medicine and Technology. 2012;2(4):11-17. [Persian].
4. Richards JG. The measurement of human motion: A comparison of commercially available systems, Human Movement Science. 1999;18(5):589-602. [DOI:10.1016/S0167-9457(99)00023-8]
5. Winter DA. Biomechanics and Motor Control of Human Movement, Wiley, 2009. [DOI:10.1002/9780470549148]
6. Rong Z, Zhaoying Z. A real-time articulated human motion tracking using tri-axis inertial/magnetic sensors package, IEEE Transactions on Neural Systems and Rehabilitation Engineeringk. 2004;12(2): 29. [DOI:10.1109/TNSRE.2004.827825] [PMID]
7. Roetenberg D. Inertial and magnetic sensing of human motion, These de doctorat, 2006.
8. Pellegrini A, Tonino P, Paladini P, Cutti A, Ceccarelli F, Porcellini G. Motion analysis assessment of alterations in the scapulo-humeral rhythm after throwing in baseball pitchers, Musculoskeletal surgery. 2013; 97(1):9-13. [DOI:10.1007/s12306-013-0253-4] [PMID]
9. Meng Z, Yuan W, Kang Y. Plantar pressure distribution during barefoot and shod race walking. Journal of Biomechanics. 2007;40(2):534. [Persian]. [DOI:10.1016/S0021-9290(07)70524-9]
10. Gary B. Wilkerson & Ed Behan. The advantages of a dynamic stability system compared to a static force plate system for orthopedic and musculoskeletal rehabilitation. Clinical Resource Manual. 1999;3(7):3-12.
11. Lee MS, Vanore JV, Thomas J, Catanzariti AR, Kogler G, Kravitz SR, et al. Diagnosis and treatment of adult flatfoot. Journal of Foot and Ankle Surgery. 2005,44(2):78-113. [DOI:10.1053/j.jfas.2004.12.001] [PMID]
12. Chen YC, Lou SZ, Huang CY, Su FC. Effects of foot orthoses on gait patterns of flat feet patients. Clinical biomechanics. 2010;25(3):265. [DOI:10.1016/j.clinbiomech.2009.11.007] [PMID]
13. Boyer R, Gitter A, Barnes L. Determination of ankle muscle power in normal gait using an EMG-to-force processing approach. Journal of Electromyography and Kinesiology. 2010;20:46-54. [DOI:10.1016/j.jelekin.2008.09.013] [PMID]
14. Stewart L, Gibson J, Thomson CE. In-shoe pressure distribution in "unstable"(MBT) shoes and flat-bottomed training shoes: a comparative study. Gait & posture. 2007;25(4): 648-651. [DOI:10.1016/j.gaitpost.2006.06.012] [PMID]
15. Gandamakar E, Eslami M, Naghizadeh Qomi M, Gandmakar A. Effectiveness of the work on the basis of the work in the fields of the panels with the panels of the panels and the years. Applied physiology research paper J. 2012;11(21):117-124. [Persian].
16. Bacarin TA, Canettieri MG, Akashi PMH, Sacco ICN. Plantar pressure distribution differences between flat and normal feet in healthy subjects. Journal of biomechanics. 2006;39(1):111. [DOI:10.1016/S0021-9290(06)83341-5]
17. Simkin A, Leichter I, Giladi M, Stein M, Milgrom C. Combined effect of foot arch structure and an orthotic device on stress fractures. Foot & ankle. 1989;10(1): 25. [DOI:10.1177/107110078901000105] [PMID]
18. Zadpoor A, Asadi Nikooyan A. The relationship between lower-extremity stress fractures and the ground reaction force: A systematic review. Clinical Biomechanics. 2011; (26):23-28. [DOI:10.1016/j.clinbiomech.2010.08.005] [PMID]
| بازنشر اطلاعات | |
 |
این مقاله تحت شرایط Creative Commons Attribution-NonCommercial 4.0 International License قابل بازنشر است. |

تماس با ما
فصلنامه بیومکانیک ورزشی
همدان،شهرک مدنی، بلوار امام خمینی(ره)، بلوار پروفسور موسیوند، مجتمع دانشگاه آزاد اسلامی واحد همدان، معاونت پژوهش و فناوری، دفتر مجلات علمی
صندوق پستی: 734
تلفن دفتر نشریه: 08134494042
وبسایت: http://biomechanics.iauh.ac.ir
ایمیل: sportbiomechanics@iauh.ac.ir