دوره 9، شماره 4 - ( 12-1402 )
جلد 9 شماره 4 صفحات 319-302 |
برگشت به فهرست نسخه ها



![]()
![]()
![]()
Download citation:
BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:



BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:
Ashrafizadeh M, Norasteh A. Comparison of the Effects of Exercises with and without Feedback on Lower Extremity Kinematics During Jump Landing Tasks in Men with Selected Motor Control Defects: A Randomized Clinical Trial. J Sport Biomech 2024; 9 (4) :302-319
URL: http://biomechanics.iauh.ac.ir/article-1-330-fa.html
URL: http://biomechanics.iauh.ac.ir/article-1-330-fa.html
اشرفی زاده محدثه، نورسته علی اصغر. مقایسه اثر تمرینات با و بدون بازخورد بر کینماتیک اندام تحتانی حین تکالیف پرش فرود در مردان با نقص کنترل حرکتی منتخب: کارآزمایی بالینی تصادفی. مجله بیومکانیک ورزشی. 1402; 9 (4) :302-319



1- گروه آسیب های ورزشی و تمرینات اصلاحی، دانشکده تربیت بدنی و علوم ورزشی، دانشگاه گیلان، رشت، ایران.
2- گروه فیزیوتراپی، دانشکده پزشکی، دانشگاه علوم پزشکی گیلان، رشت، ایران.
2- گروه فیزیوتراپی، دانشکده پزشکی، دانشگاه علوم پزشکی گیلان، رشت، ایران.
متن کامل [PDF 2023 kb]
(735 دریافت)
| چکیده (HTML) (2882 مشاهده)
متن کامل: (1366 مشاهده)
مقدمه
آسیبهای رباط صلیبی قدامی یکی از شایعترین آسیبهای زانو در ورزش است. با وجود تلاشهای محققان و پزشکان برای کاهش خطر، آسیبهای رباط صلیبی قدامی در دو دهه گذشته دو برابر شده است. با اینکه خط نسبی این آسیب در زنان 8-2 برابر بیشتر از مردان است اما بهطورکلی به دلیل مشارکت بیشتر در ورزشهای تماسی و تیمی، بروز آسیب رباط صلیبی قدامی در مردان بیشتر است (1). 85 درصد از این صدمات در موقعیتهای غیرتماسی اتفاق میافتد، بهویژه مواردی که شامل مانورهای سایدکاتینگ، فرود و تعادل است (2). طیف وسیعی از آسیبهای غیر تماسی مانند پارگی رباط صلیبی قدامی، و سندرم درد کشکک رانی ناشی از بارگذاری نامنظم مفصل زانو ناشی از والگوس پویا بیشازحد زانو است (3). معمولاً در افراد با آسیبهای غیر برخوردی زانو، تغییر در متغیرهای حرکتی اندام تحتانی در حین انجام وظایف عملکردی دیده میشود. بهطور خاص، افزایش حرکت زانو در صفحه فرونتال حین انجام وظایف عملکردی، معروف به جابجایی داخلی زانو، پیشبینی کننده آسیب غیربرخوردی رباط صلیبی قدامی و درد پاتلوفمورال است (3, 4). مانور فرود یکی از وظایف اساسی در فعالیتهای ورزشی پرخطر مانند والیبال، هندبال و بسکتبال است. تکنیک فرود ممکن است بر نیروی واکنش زمین و کینماتیک اندام تحتانی تأثیر بگذارد. بنابراین، مکانیک فرود ضعیف با حرکت ناکافی در مفاصل ران و زانو نهتنها جذب شوک را کاهش نمیدهد، بلکه خطر آسیب اندام تحتانی را نیز افزایش میدهد. نمونهای از تکنیک فرود ضعیف، والگوس پویا بیشازحد زانو است که بهعنوان والگوس زانو، افت لگن مقابل، چرخش داخلی ران، و جابجایی خارجی کشکک، مشخص میشود (5-7). والگوس پویای عمدتاً ناشی از ضعف ابداکتور هیپ است که منجر به صدمات غیر تماسی آسیب رباط متقاطع قدامی میشود. همچنین یکی دیگر از تکنیکهای فرود ضعیف، فرود با فلکشن کمتر زانو است که ممکن است منجر به آسیبهای غیر تماسی اندام تحتانی شود. این به دلیل افزایش نیروهای واکنش زمینی در هنگام این نوع فرود است که باعث افزایش بار روی زانو میشود که منجر به افزایش خطر آسیب رباط صلیبی قدامی میشود (7, 8). در سالهای اخیر، پیشگیری از آسیبهای رباط صلیبی قدامی به یک موضوع کلیدی در میان محققان تبدیل شده است. تمرینات پلایومتریک، تعادل، چابکی و دستورالعملهای اصلاح فرود با فلکشن زانو بیش از 30 درجه در مانور پرش- فرود اجزای رایج برنامههای تمرینی پیشگیری از آسیب رباط صلیبی قدامی هستند (9). علاوه بر این آزمونهای غربالگری متعددی بهمنظور شناسایی و ثبت متغیرهای مرتبط با آسیب و سازگاری الگوهای حرکتی پس از برنامههای پیشگیری از آسیب ارائه شده است که از مهمترین این آزمونها میتوان به فعالیتهای پرشی مانند پرش تاک و پرش عمودی اشاره کرد (10-13). علاوه بر آزمونهای غربالگری مداخلات بسیاری بهمنظور بهبود الگوهای حرکتی نامطلوب و عوامل خطری که منجر به آسیب رباط صلیبی قدامی میشوند، شناسایی شدهاند. از جمله این مداخلات بازخورد است. از بازخورد معمولاً برای اصلاح بیومکانیک بالقوه آسیبزا در حین حرکات خاص استفاده میشود (14, 15). تحقیقات زیادی اثرات بازخورد را بر کاهش نیروی عمودی عکسالعمل زمین، افزایش فلکشن ران، زانو و مچ پا و بهبود دامنه حرکتی مفاصل اندام تحتانی مثبت دانستهاند، اما نتایج در ارتباط با کینماتیک صفحه فرونتال ضدونقیض است (16-19). درحالیکه الگوهای حرکتی نامطلوب در صفحه ساجیتال (فرود با حداقل فلکشن در زانو) و فرونتال (فرود با والگوس پویای زانو) دو تکنیک غلط شایع هستند که منجر به آسیب رباط صلیبی قدامی میشوند (4, 7). علاوه بر این فعالیتهای پرشی شامل یک دوره چندمرحلهای اکسنتریک، کانسنتریک، حداکثر فلکشن زانو و لحظه فرود است، که یک مرحله با شروع مرحله بعدی به پایان نمیرسد بلکه تا اواسط مرحله بعد از خود ادامه دارد از طرفی برخی مطالعات نشان دادهاند که مرحله لحظه فرود با اتمام پرش و تماس پا با زمین به پایان نمیرسد بلکه تا 200 میلیثانیه بعد ادامه دارد (20). بنابراین با توجه به همپوشانی داشتن مراحل مختلف یک فعالیت پرشی اندازهگیری متغیرها در تمامی مراحل جهت شناسایی بهتر موقعیت زمانی آسیب ضروری است. بااینحال مطالعات اندکی چهار مرحله فعالیتهای پرشی را بررسی کردهاند. همچنین اکثر مطالعات به نقش کوتاهمدت بازخورد توجه کردهاند بنابراین مطالعه حاضر اثر بلندمدت بازخورد بر کینماتیک صفحه ساجیتال و فرونتال در مراحل مختلف فعالیتهای پرشی را بررسی کرده است.
روش شناسی
مطالعه حاضر از نوع کارآزمایی بالینی تصادفی میباشد و جامعه آماری تحقیق حاضر را کلیه دانشجویان دانشگاههای تهران با نقصهای کنترل حرکتی زانو که بهصورت تفریحی ورزش میکنند تشکیل دادند. یک ورزشکار تفریحی بهعنوان کسی که حداقل سه بار در هفته، حداقل 30 دقیقه در فعالیت هوازی یا ورزشی شرکت کند تعریف میشود (20). جهت دسترسی به جامعه هدف اطلاعرسانی از طریق برد دانشگاههای تهران(بهطور اختصاصیتر دانشگاه علامه طباطبایی) انجام شد. با استفاده از نرمافزار G.power، G*Power, Franz Faul University of Kiel, Germany)) و با فرض α=0.08، Effect Size=0.3 و 1-β=0.95، 34 نفر از دانشجویان مرد (18-28 سال) دانشگاههای تهران با نقصهای کنترل حرکتی زانو (والگوس پویا زانو و غلبه چهار سر ران) و با توجه به معیارهای ورود به تحقیق و روش نمونهگیری در دسترس، بهصورت تصادفی و با نسبت 1:1 در دو گروه، بازخورد (17n =) و کنترل (17n =). معیارهای ورود به تحقیق، داشتن شاخص توده بدنی طبیعی بین 18 تا 24، سن بین (28-18)، داشتن حداقل نیم ساعت فعالیت بدنی در هفته، شرکت نکردن در برنامههای توانبخشی اندام تحتانی طی 6 ماه گذشته و داشتن نقص الگوی حرکتی (والگوس پویای زانو، غلبه چهارسرران)، بود و معیارهای خروج از تحقیق شامل، سابقه آسیبدیدگی عضلانی (عضلات مورد مطالعه) در دو ماه گذشته، سابقه آسیبدیدگی اندام تحتانی، لگن، زانو و مچ در شش ماه گذشته، اختلالات تعادلی ثانویه به اختلال وستیبولار یا نرولوژیکال که میتواند باعث از دست دادن تعادل شود، سابقه جراحی در کمر و اندام تحتانی در یک سال گذشته و هر بیماری که تأثیر منفی بر عملکرد و ایمنی فرود پس از پرش، داشته باشد، بود (20).
تحقیق حاضر در مرکز کلینیک توانبخشی موفقیان زیر نظر دانشگاه صنعتی شریف انجام شد. ابتدا غربالگری با استفاده از پرش تاک و به روش بصری انجام شد. از افراد خواسته شد که پرش عمودی حداکثری را با حداکثر سرعت برای 10 ثانیه انجام دهند. حین غربالگری به مواردی مانند والگوس پویای زانو هنگام فرود، عدم فاصله پاها به اندازه عرض شانه هنگام فرود و صدای بیشازحد تماس پاها با زمین هنگام فرود توجه شد. در صورت مشاهده یک نقص برای بیشتر از دو بار در پرش و فرودهای متوالی بهعنوان الگوی حرکتی ناقص در نظر گرفته میشد. پس از انتخاب افراد دارای نقص الگوی حرکتی، شرکتکنندگان توضیحاتی را در رابطه با فرآیند اجرا و فواید تحقیق حاضر دریافت کرده و فرم رضایتنامه شرکت در آزمون توسط آنان بهصورت داوطلبانه تکمیل شد. بهطورکلی افراد به شکل تصادفی در دو گروه بازخورد خارجی و کنترل انتخاب شدند. بهمنظور تصادفی¬سازی به هر فرد یک عدد اختصاص داده شد؛ سپس با استفاده از یک مولد اعداد تصادفی یا جداول اعداد تصادفی، افراد بهصورت تصادفی برای گروه¬ها برگزیده شدند. آزمودنیها تکالیف حرکتی پرش فرود (9, 21) (پرش تاک، پرش کانترموومنت و پرش عمودی) را با 4 دقیقه استراحت بین تکالیف حرکتی بهصورت تصادفی، قبل از اعمال مداخله و پس از هشت هفته برنامه تمرینی بازخورد (22) انجام دادند، لازم به ذکر است گروه کنترل برنامه تمرینی هشت هفتهای را بدون هیچ بازخوردی دریافت کردند. پس از فرآیند مارکر¬گذاری ابتدا فیلمهای آموزشی به آزمودنیها نشان داده و سپس حین انجام تکلیف بهصورت کلامی بازخورد ارائه میشد. الگوی هر پرش سه بار و با 20 ثانیه استراحت بین هر تکرار انجام شد و درنهایت میانگین سه تکرار برای هر پرش در نظر گرفته شد. آزمودنیها قبل از اجرای تکالیف حرکتی، جهت گرم کردن، 5 دقیقه بدون مقاومت با سرعت دلخواه بر روی دوچرخه ثابت رکاب زدند. آزمونها در دو مرحله انجام شد، یکبار قبل از اعمال مداخله و مرحله بعدی دو ماه بعد از اعمال مداخله. برای ثبت کینماتیک مفاصل (در چهار فاز اکسنتریک، کانسنتریک، حداکثر فلکشن ران و لحظه فرود) از دستگاه آنالیز حرکت استفاده شد. بهعنوان مداخله از بازخورد خارجی ترکیبی (بهصورت بصری و کلامی) در طول هشت هفته برنامه تمرینی پرشی و هنگام تکالیف حرکتی (پرش عمودی، تاک و کانترموومنت) استفاده شد. بهمنظور بازخورد بصری ابتدا فیلمهای آموزشی جهت اصلاح راستای نامناسب به افراد نشان داده شد سپس بازخورد کلامی (زانوها را بیشتر خم کنید، زانو را در راستای انگشتان پا قرار دهید، زانو را به سمت دیوار (منبع خارجی) فشار دهید)، اعمال شد (18, 19, 23). جهت ارزیابی کینماتیک اندام تحتانی حین تکالیف حرکتی پس از کالیبراسیون سیستم و قبل از انجام آزمون 18 مارکر بازتابنده آناتومیکی با قطر 15 میلیمتر در هر دو پا به روش پلاگین گیت بر روی سر متاتارسال دوم، قوزک خارجی، پشت پاشنه پا، قسمت میانی خارجی ساق پا، کندیل خارجی زانو، تروکانتر بزرگ، قسمت میانی خارجی فمور، خار خاصرهای قدامی فوقانی و خار خاصرهای خلفی فوقانی و دو مارکر اضافی بر روی مراکز کشککها جهت اندازهگیری والگوس پویای زانو (درمجموع 20 مارکر) برای هر فرد نصب شد. تمام فرایند ترکینگ مارکرها، پردازش سیگنالها و به دست آوردن کینماتیک سهبعدی با استفاده از نرمافزار متلب (Natick, Mathworks USA, version7.12.0) و Nexus (Version2.5) محاسبه شد و میانگین و حداکثر زوایا در هر سه صفحه حرکتی به دست آمد. همچنین بهمنظور ثبت متغیرهای کینماتیکی از سیستم آنالیز حرکت مجهز به 10 دوربین با فرکانس نمونهبرداری 250 هرتز استفاده شد. کینماتیک اندام تحتانی بهعنوان حرکت مفصل دیستال نسبت به رفرنس پروگزیمال تعریف و محاسبه شد. جهت محاسبه کینماتیک هیپ: حرکت فمور نسبت به لگن، کینماتیک زانو: حرکت تیبیا نسبت به فمور و کینماتیک مچ پا: حرکت مچ پا نسبت به تیبیا در نظر گرفته شد. در مطالعه حاضر میانگین و دامنه حرکتی مفاصل ران، زانو و مچ پا در صفحه ساجیتال، حین تکالیف پرش- فرود (پرش تاک، پرش عمودی و پرش کانترموومنت) در چهار مرحله اکسنتریک، کانسنتریک، حداکثر فلکشن زانو و مرحله لحظه فرود و میزان والگوس زانو محاسبه شد. در برنامه تمرینی دوماهه، هفتههای (3-1) تمرینات بر روی تکنیکهای اساسی مانند اسکات، لانچ و پرش از پهلوبهپهلو متمرکز بود. هفتههای (6-4)، تمرینات اساسی مانند پرش تاک، پرش اسکات، پرش یکپا و پرش روی زمین ناپایدار انجام شد. پسازآن، در مرحله عملکردی (8-7)، تمرینهای سختتر مانند حداکثر پرش و حرکات برشی و دویدن به افراد داده شد. برنامه تمرینی بهصورت سه جلسه در هفته به مدت 10 دقیقه، با یک دقیقه استراحت بین تکرارها، انجام شد (22). ضمن اینکه گروه مداخله برنامه تمرینی دوماهه را با بازخورد خارجی دریافت کردند. بهمنظور بررسی، تجزیهوتحلیل آماری دادههای خام بهدستآمده از تحقیق، از آمار توصیفی و استنباطی استفاده شد. برای توصیف ویژگیهای دموگرافی آزمودنیها از میانگین توصیفی و انحراف معیار و جهت بررسی طبیعی بودن توزیع دادهها از آزمون شاپیرو ویلک استفاده شد. با توجه به طبیعی بودن توزیع دادهها، پس از آنالیز، طبیعی سازی و فیلترینگ دادههای حاصل از کینماتیک اندام تحتانی با استفاده از نرمافزار متلب، برای تعیین تفاوتهای بین گروهی (گروه بازخوردی و گروه کنترل) و زمان (پیشآزمون و پسآزمون) از آزمون آماری میکس آنووا (Mixed Model ANOVA 2 ×2) برای هر تکلیف حرکتی و سپس مقایسه از طریق آزمون تعقیبی (بونفرونی) انجام شد. عامل درونگروهی بهعنوان اثر اصلی زمان و عامل بین گروهی بهعنوان اثر اصلی گروه در نظر گرفته شد. همچنین، از آزمون لون برای همگنی واریانس استفاده شد و 95 درصد فاصله اطمینان (CI95%) بر اساس اختلاف میانگین گروه تعدیلشده محاسبه شد و مقادیر اندازه اثر دی کوهن، 8/0، 5/0 و 2/0 بهعنوان اندازه اثر "بزرگ"، "متوسط" و "کوچک" در نظر گرفته شد. درنهایت دادههای خام حاصل از تحقیق در برنامه اکسل جمعبندی و با برنامه SPSS نسخه 21 (SPSS version 21, Microsoft Corp, Redmond, WA) مورد تجزیهوتحلیل قرار گرفتند.
نتایج
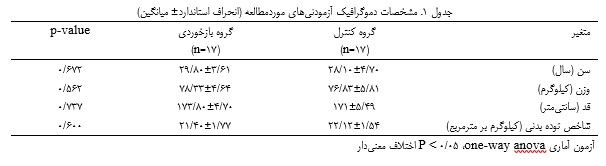
بررسی ویژگیهای دموگرافیکی نشان داد که در میانگین و انحراف معیار قد، وزن، سن، شاخص توده بدنی افراد بین دو گروه از نظر آماری تفاوت معناداری وجود ندارد (05/0<p) (جدول 1). در فاز اکسنتریک پرش عمودی، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی ران و زانو مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (44/1= اندازه اثر، 001/0=p)، زانو (12/1= اندازه اثر، 001/0=p) و مچ پا (81/0= اندازه اثر، 001/0=p) در مرحله اکسنتریک حین پرش عمودی داشته است. در فاز کانسنتریک پرش عمودی، اختلاف معناداری بین گروهی وجود نداشت. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی زانو (52/0= اندازه اثر، 045/0=p) در مرحله کانسنتریک حین پرش عمودی داشته است. در فاز حداکثر فلکشن زانو در پرش عمودی، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی ران و زانو مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (14/1= اندازه اثر، 001/0=p)، زانو (93/0= اندازه اثر، 001/0=p) و مچ پا (84/0= اندازه اثر، 001/0=p) در مرحله حداکثر فلکشن زانو حین پرش عمودی داشته است و در فاز لحظه فرود پرش عمودی، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو و مچ پا شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (15/1= اندازه اثر، 001/0=p)، زانو (75/1= اندازه اثر، 001/0=p) و مچ پا (82/1= اندازه اثر، 001/0=p) در مرحله لحظه فرود حین پرش عمودی داشته است (جدول 2).
در فاز اکسنتریک پرش تاک، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (86/0= اندازه اثر، 001/0=p)، زانو (97/0= اندازه اثر، 001/0=p) و مچ پا (90/0= اندازه اثر، 001/0=p) در مرحله اکسنتریک حین پرش تاک داشته است. در فاز کانسنتریک پرش تاک، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (80/0= اندازه اثر، 001/0=p)، زانو (08/1= اندازه اثر، 001/0=p) در مرحله کانسنتریک حین پرش تاک داشته است. در فاز حداکثر فلکشن زانو، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی ران، زانو و مچ پا مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (20/1= اندازه اثر، 001/0=p)، زانو (82/0= اندازه اثر، 001/0=p) و مچ پا (10/1= اندازه اثر، 001/0=p) در مرحله حداکثر فلکشن زانو حین پرش تاک داشته است و در فاز لحظه فرود پرش تاک، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو و مچ پا مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (98/0= اندازه اثر، 009/0=p)، زانو (03/2= اندازه اثر، 001/0=p) و مچ پا (12/1= اندازه اثر، 001/0=p) در مرحله لحظه فرود حین پرش تاک داشته است (جدول 3).
جدول 2. نتایج تغییرات دامنه حرکتی ران، زانو و مچ پای ورزشکاران قبل و بعد از هشت هفته تمرین حین پرش عمودی (انحراف استاندارد± میانگین)
نتایج بهصورت میانگین ± انحراف استاندارد بیان شده است؛ *، اختلاف آماری معنادار (05/0>P)؛ ¥، اختلاف معنادار پیشآزمون به پسآزمون؛ †، اندازه اثر (%95 فاصله اطمینان)؛ £، اندازه اثر بزرگ دی کوهن (8/0)؛ نتایج آزمون تعقیبی بونفرونی: a = تفاوت معنادار بین گروه بازخوردی و گروه کنترل
جدول 3. نتایج تغییرات دامنه حرکتی ران، زانو و مچ پای ورزشکاران قبل و بعد از هشت هفته تمرین حین پرش تاک (انحراف استاندارد± میانگین)
بحث
این مطالعه با هدف بررسی اثر هشت هفته تمرین بازخوردی بر متغیرهای کینماتیکی ورزشکاران مرد با نقص کنترل حرکتی (والگوس پویا زانو و غلبه چهار سر ران) در تکالیف پرش فرود انجام شد. بهطورکلی نتایج مطالعه حاضر بر اساس آزمون آماری آنالیز واریانس دوطرفه نشان داد که بهطورکلی نتایج مطالعه حاضر بر اساس آزمون آماری آنالیز واریانس دوطرفه نشان داد که هشت هفته برنامه تمرینی بازخورد بر کینماتیک ران، زانو و مچ پا در ورزشکاران با نقصهای کنترل حرکتی (والگوس پویای زانو و غلبه چهارسرران) حین تکالیف حرکتی پرش-فرود (پرش عمودی، پرش تاک و پرش کانترموومنت) تأثیر معناداری دارد. بهطور دقیقتر در هر سه پرش در سه مرحله (اکسنتریک، حداکثر فلکشن زانو و لحظه فرود) گروه بازخوردی افزایش معناداری در دامنه حرکتی هیپ، زانو و مچ پا داشته است. در فاز کانسنتریک پرشهای عمودی و کانترموومنت بازخوردی افزایش معناداری در دامنه حرکتی زانو و در فاز کانسنتریک پرش تاک گروه بازخوردی افزایش معناداری در دامنه حرکتی ران و زانو داشت این به معنای اثربخشی بیشتر پرش تاک در فاز کانسنتریک نسبت به دو پرش دیگر است. 25 درصد اول فاز اتکا برای تجزیهوتحلیل انتخاب شد (مرحله اکسنتریک) زیرا اوج بارگذاری رباط صلیبی قدامی در 60 میلیثانیه اول هنگام فرود تخمین زده شده است (24). از طرفی مشخص شده که کاهش دامنه حرکتی مفاصل اندام تحتانی در صفحه ساجیتال منجر به والگوس زانو شده که خطر آسیب رباط صلیبی قدامی را افزایش میدهد (25). در مطالعه حاضر بازخورد باعث بهبود دامنه حرکتی مفاصل اندام تحتانی در تمامی مراحل شد که این نتایج با مطالعات بسیاری در این زمینه همسو است. هرچند مطالعات محدودی به بررسی کینماتیک اندام تحتانی در چهار مرحله پرداختهاند اکثر مطالعات کینماتیک را در مرحله حداکثر فلکشن زانو بررسی کردهاند. همچنین آزمون آماری آنالیز واریانس دوطرفه نشان داد که هشت هفته برنامه تمرینی بازخورد بر میزان جابهجایی داخلی زانو در ورزشکاران با نقصهای کنترل حرکتی (والگوس پویای زانو و غلبه چهارسرران) حین تکالیف حرکتی پرش-فرود (پرش عمودی، پرش تاک و پرش کانترموومنت) تأثیر معناداری دارد. بهطور دقیقتر نتایج بازخورد در هر سه پرش بر میزان جابهجایی داخلی زانو یکسان بود. در مطالعهای از اریکسون و همکاران (2016) افزایش دامنه حرکتی زانو و ران را در گروه بازخورد شاهد بودیم ضمن اینکه این بهبود در گروه بازخورد ترکیبی نسبت گروههای بازخورد سنتی بیشتر بوده است که مطابق با نتایج مطالعه حاضر است (26). در این مطالعه بازخورد سنتی و بازخورد ترکیبی(سنتی و بازخورد در زمان واقعی) را به مدت چهار هفته و همچنین یک هفته بدون بازخورد (بهمنظور بررسی حفظ اثر بازخورد) بررسی کردند. گروه بازخورد ترکیبی افزایش فلکشن زانو و ران را به ترتیب 3/11 درجه و 9/10 درجه نشان دادند. همچنین نیروی عمودی واکنش زمین در هر دو گروه کاهش یافت. همچنین این مطالعه گزارش کرده است که گروهها قادر به حفظ تغییرات بیومکانیکی بهدستآمده پس از مداخله 4 هفتهای و پس از 1 هفته بدون حفظ بازخورد، نبودند. هرچند که گروه بازخورد ترکیبی نسبت به بازخورد سنتی در حفظ تغییرات بیومکانیکی برتر بود. بر طبق نتایج مطالعه بالا، بااینکه در مطالعه حاضر هشت هفته تمرین بازخوردی باعث بهبود کینماتیک اندام تحتانی شد اما برای یافتن این سؤال که آیا افراد قادر به حفظ تغییرات بیومکانیکی هستند یا خیر مطالعه دیگری نیاز است. در مطالعه فاوری و همکاران (2016) که به بررسی اصلاح فلکشن زانو بر عوامل خطر آسیب رباط صلیبی قدامی در ورزشکاران سالم پرداخته بود، دامنه حرکتی زانو در فاز حداکثر فلکشن زانو افزایش یافت. زاویه فلکشن زانو پس از اصلاح بهطور قابلتوجهی از 2/11 درجه به 2/15 درجه در تماس اولیه و از 8/67 درجه به 7/100 درجه در حداکثر فلکشن زانو افزایش یافت و زمان بین تماس اولیه و حداکثر فلکشن از 4/177 به 4/399 میلیثانیه افزایش یافت. اصلاح فلکشن باعث کاهش قابلتوجهی در نیروی واکنش عمودی زمین با کاهش همزمان در حداکثر گشتاور خمشی شد. اما نکته جالبتوجه در این مطالعه این بود که اصلاح فلکشن زانو، زاویه و گشتاور ابداکشن را فقط در افرادی که در یک موقعیت اداکشن اولیه فرود آمدند تحت تأثیر قرار داد و در افرادی که با یک موقعیت ابداکشن اولیه فرود آمدند تأثیری نداشت. بنابراین مطالعه پیشنهاد داده که برای که انتخاب مداخلات جهت جلوگیری از آسیبهای رباط صلیبی قدامی باید ویژگیهای خاص بیمار را در نظر گرفت (27). در مطالعه حاضر افزایش فلکشن زانو و کاهش اداکشن زانو بهصورت همزمان بهعنوان دستورالعملی برای فرود، میزان ابداکشن زانو را تحت تأثیر قرار داد و موجب کاهش آن شد که از این نظر با مطالعه فاوری و همکاران (2016)در تضاد است. مطالعات بازخوردی بیشتر به کینماتیک و کینتیک صفحه ساجیتال پرداختهاند بااینحال برخی مطالعات کینماتیک و کینتیک صفحه فرونتال را هم مورد بررسی قرار دادهاند، بهطور مثال اریکسون و همکاران (2015) طی مطالعهای تأثیر بازخورد در زمان واقعی بر روی کینماتیکهای پرش فرود ورزشکاران را بررسی کردند. در مطالعه آنها هیچ تغییری بین گروههای بازخوردی در زاویه والگوس زانو مشاهده نشد که با نتایج مطالعه حاضر همسو نیست (24). مطالعه اریکسون بازخورد را در کوتاهمدت و بر روی زنان بررسی کرده است که ممکن است تفاوت در نتایج ناشی از آن باشد. همچنین نوع بازخورد در مطالعات ما هم متفاوت بود. در مطالعه دیگری مارشال و همکاران (2020) اثر بازخورد بصری بر کینماتیک اندام تحتانی افراد با والگوس پویا را بررسی کردند، که درنهایت بازخورد باعث کاهش میزان والگوس زانو شد بهطور دقیقتر پس از مداخله، گروه بازخورد 03/13 درجه بیشتر فلکشن زانو را در طول 100 میلیثانیه اول قبل از تماس اولیه و 16/6 درجه کمتر ابداکشن زانو 200 میلیثانیه پس از تماس اولیه نسبت به گروه کنترل نشان دادند. گروه بازخورد همچنین کاهش 02/3 درجهای در اوج ابداکشن زانو در مقایسه با مقادیر پایه نشان داد (20). در مطالعه مارشال گزارش شد که انجام یک جلسه تمرینی باعث تغییر در الگوی حرکتی افراد و کاهش والگوس پویا حین تکالیف پویا خواهد شد. همچنین در مطالعه دیگر اثر هشت هفته تمرینات عصبی عضلانی با تمرکز بیرونی بر مردانی که بازسازی رباط صلیبی قدامی انجام داده بودند بررسی شد. در گروه تجربی کاهشی در حداکثر والگوس زانو، حداکثر نیروی برشی قدامی تیبیا حداکثر گشتاور ابداکشن زانو، مشاهده شد که با نتایج این مطالعه همسو است (28). البته در این راستا اریکسن و همکاران (2016) افرادی را که در یک برنامه بازخورد 4 هفتهای با تمرکز بر پرش عمودی شرکت کرده بودند، مورد مطالعه قرار دادند. هرچند آنها تغییرات پایدار پس از مداخله را مشاهده نکردند، اما قبل از مداخله، حرکت کینماتیکی معیوب را غربال نکردند. بنابراین، ممکن است تفاوتها در شرکتکنندگانی که الگوهای حرکتی معیوب نداشتند، پنهان شده باشد که ممکن است اختلاف در نتایج به همین دلیل باشد (26).
از محدودیتهای مطالعه حاضر میتوان به این موارد اشاره کرد، عدم بررسی کینتیک زانو جهت بررسی گشتاورها حین تکالیف پرشی و با توجه به اینکه شرکتکنندگان در پژوهش حاضر مردان فعال بودند، نتایج حاصل از این تحقیق را نمیتوان به همه افراد از جمله زنان، افراد مسن و یا با شاخص توده بدنی بالا تعمیم داد؛ بنابراین پیشنهاد میشود، شاخصهای کینتیکی از جمله گشتاورها نیز حین تکالیف عملکردی با شدتهای متفاوت جهت ارائه اطلاعات دقیقتر از مؤثر بودن مداخله در طراحی پروتکلهای تمرینی بررسی شود. همچنین ازآنجاییکه نسبت فعالیت عضلات همسترینگ داخلی بر خارجی بر میزان والگوس زانو اثرگذار است بنابراین در تحقیقی دیگر علاوه براثر بازخورد بر عضلات همسترینگ خارجی اثر آن بر عضلات همسترینگ داخلی هم مشخص شود. همچنین در تحقیقی دیگر اثر بازخورد در تکالیف پرشی مختلف به فرض مثال فرودهای تک پا را بررسی کنند و به مقایسه نتایج حاصل از آنها با تکالیف فرود دو پا بپردازند. بهعلاوه با توجه به اینکه عوامل زیادی همانند طول مدت بازخورد، نوع بازخورد و نوع فعالیتهای عملکردی، بر نتایج حاصل از بازخورد اثرگذارند پیشنهاد میشود این مداخله در دورههای مختلف بهطور مثال قبل از فصل مسابقات یا بعد از آن بررسی شود و نتایج حاصل از آنها مقایسه شود. همچنین در مطالعه مشابه دیگری این موضوع بررسی شود که آیا در افراد ورزشکار حرفهای که یادگیری آنها بالا بوده و یا خیلی ثابت شده است این تغییرات رخ میدهد یا خیر؟ و اینکه آیا این تمرینات در فعالیت ورزشی فرد تغییر ایجاد میکند و در حین فعالیت ورزشی باقی میماند و یا فقط در محیط آزمایشگاهی باقی میماند؟
نتیجه گیری نهایی
هشت هفته برنامه تمرینی بازخورد بر کینماتیک هیپ، زانو و مچ پا در ورزشکاران با نقصهای کنترل حرکتی (والگوس پویای زانو و غلبه چهارسرران) حین تکالیف حرکتی پرش-فرود (پرش عمودی، پرش تاک و پرش کانترموومنت) تأثیر معناداری دارد و بازخورد باعث افزایش دامنه حرکتی در مفاصل اندام تحتانی و درنتیجه کاهش آسیب رباط صلیبی قدامی میشود. هشت هفته برنامه تمرینی بازخورد بر میزان زاویه والگوس زانو در ورزشکاران با نقصهای کنترل حرکتی (والگوس پویای زانو و غلبه چهارسرران) حین تکالیف حرکتی پرش-فرود (پرش عمودی، پرش تاک و پرش کانترموومنت) تأثیر معناداری دارد بنابراین بازخورد باعث کاهش زاویه والگوس در هر سه پرش میشود و بیشترین اثرگذاری مربوط به پرش عمودی است.
تشکر و قدردانی
نویسندگان مایلند از همه شرکتکنندگان و کارکنان آزمایشگاه تحلیل حرکت برای همکاری جهت انجام این مطالعه تشکر کنند.
ملاحظات اخلاقی
پیروی از اصول اخلاق پژوهش
ملاحظات اخلاقی این مطالعه حاصل رساله مقطع دکتری با کد اخلاق (IR.GUILAN.REC.1402.001) از دانشگاه گیلان بود. کلیه استانداردهای اخلاقی حاکم بر تحقیقات بالینی، مانند کسب رضایت آگاهانه و آزادانه، عـدم آسیب به مشارکتکنندگان، محرمانه بودن اطلاعات، آگـاهی از انصـراف از مطالعـه در هـر زمـان، حـریم خصوصی و عدالت رعایت شده است.
حامی مالی
این مطالعه حاصل رساله دکتری دانشگاه گیلان بوده و از هیچ سازمان دیگری حمایت مالی دریافت ننموده است.
مشارکت نویسندگان
جمعآوری و ترکیب دادهها توسط محدثه اشرفی زاده؛ مفهومسازی، ایده سازی، طراحی مطالعه و ویرایش توسط همه نویسندگان انجام شد.
تعارض
نویسندگانی که نام آنها ذکر شده است گواهی میدهند که به جز دانشگاه گیلان و دانشگاه علوم پزشکی گیلان هیچ وابستگی یا مشارکتی با هیچ سازمان یا نهادی با هرگونه منافع مالی (مانند حقالزحمه، کمکهزینه تحصیلی، مشارکت در دفتر سخنرانان، عضویت، استخدام، مشاوره، مالکیت سهام، یا سایر منافع سهام؛ ترتیبات صدور مجوز ثبت اختراع)، یا منافع غیرمالی (مانند روابط شخصی یا حرفهای، وابستگیها، دانش یا اعتقادات) در موضوع یا مواد مورد بحث در این دستنوشته، نداشتهاند.
روش شناسی
مطالعه حاضر از نوع کارآزمایی بالینی تصادفی میباشد و جامعه آماری تحقیق حاضر را کلیه دانشجویان دانشگاههای تهران با نقصهای کنترل حرکتی زانو که بهصورت تفریحی ورزش میکنند تشکیل دادند. یک ورزشکار تفریحی بهعنوان کسی که حداقل سه بار در هفته، حداقل 30 دقیقه در فعالیت هوازی یا ورزشی شرکت کند تعریف میشود (20). جهت دسترسی به جامعه هدف اطلاعرسانی از طریق برد دانشگاههای تهران(بهطور اختصاصیتر دانشگاه علامه طباطبایی) انجام شد. با استفاده از نرمافزار G.power، G*Power, Franz Faul University of Kiel, Germany)) و با فرض α=0.08، Effect Size=0.3 و 1-β=0.95، 34 نفر از دانشجویان مرد (18-28 سال) دانشگاههای تهران با نقصهای کنترل حرکتی زانو (والگوس پویا زانو و غلبه چهار سر ران) و با توجه به معیارهای ورود به تحقیق و روش نمونهگیری در دسترس، بهصورت تصادفی و با نسبت 1:1 در دو گروه، بازخورد (17n =) و کنترل (17n =). معیارهای ورود به تحقیق، داشتن شاخص توده بدنی طبیعی بین 18 تا 24، سن بین (28-18)، داشتن حداقل نیم ساعت فعالیت بدنی در هفته، شرکت نکردن در برنامههای توانبخشی اندام تحتانی طی 6 ماه گذشته و داشتن نقص الگوی حرکتی (والگوس پویای زانو، غلبه چهارسرران)، بود و معیارهای خروج از تحقیق شامل، سابقه آسیبدیدگی عضلانی (عضلات مورد مطالعه) در دو ماه گذشته، سابقه آسیبدیدگی اندام تحتانی، لگن، زانو و مچ در شش ماه گذشته، اختلالات تعادلی ثانویه به اختلال وستیبولار یا نرولوژیکال که میتواند باعث از دست دادن تعادل شود، سابقه جراحی در کمر و اندام تحتانی در یک سال گذشته و هر بیماری که تأثیر منفی بر عملکرد و ایمنی فرود پس از پرش، داشته باشد، بود (20).
تحقیق حاضر در مرکز کلینیک توانبخشی موفقیان زیر نظر دانشگاه صنعتی شریف انجام شد. ابتدا غربالگری با استفاده از پرش تاک و به روش بصری انجام شد. از افراد خواسته شد که پرش عمودی حداکثری را با حداکثر سرعت برای 10 ثانیه انجام دهند. حین غربالگری به مواردی مانند والگوس پویای زانو هنگام فرود، عدم فاصله پاها به اندازه عرض شانه هنگام فرود و صدای بیشازحد تماس پاها با زمین هنگام فرود توجه شد. در صورت مشاهده یک نقص برای بیشتر از دو بار در پرش و فرودهای متوالی بهعنوان الگوی حرکتی ناقص در نظر گرفته میشد. پس از انتخاب افراد دارای نقص الگوی حرکتی، شرکتکنندگان توضیحاتی را در رابطه با فرآیند اجرا و فواید تحقیق حاضر دریافت کرده و فرم رضایتنامه شرکت در آزمون توسط آنان بهصورت داوطلبانه تکمیل شد. بهطورکلی افراد به شکل تصادفی در دو گروه بازخورد خارجی و کنترل انتخاب شدند. بهمنظور تصادفی¬سازی به هر فرد یک عدد اختصاص داده شد؛ سپس با استفاده از یک مولد اعداد تصادفی یا جداول اعداد تصادفی، افراد بهصورت تصادفی برای گروه¬ها برگزیده شدند. آزمودنیها تکالیف حرکتی پرش فرود (9, 21) (پرش تاک، پرش کانترموومنت و پرش عمودی) را با 4 دقیقه استراحت بین تکالیف حرکتی بهصورت تصادفی، قبل از اعمال مداخله و پس از هشت هفته برنامه تمرینی بازخورد (22) انجام دادند، لازم به ذکر است گروه کنترل برنامه تمرینی هشت هفتهای را بدون هیچ بازخوردی دریافت کردند. پس از فرآیند مارکر¬گذاری ابتدا فیلمهای آموزشی به آزمودنیها نشان داده و سپس حین انجام تکلیف بهصورت کلامی بازخورد ارائه میشد. الگوی هر پرش سه بار و با 20 ثانیه استراحت بین هر تکرار انجام شد و درنهایت میانگین سه تکرار برای هر پرش در نظر گرفته شد. آزمودنیها قبل از اجرای تکالیف حرکتی، جهت گرم کردن، 5 دقیقه بدون مقاومت با سرعت دلخواه بر روی دوچرخه ثابت رکاب زدند. آزمونها در دو مرحله انجام شد، یکبار قبل از اعمال مداخله و مرحله بعدی دو ماه بعد از اعمال مداخله. برای ثبت کینماتیک مفاصل (در چهار فاز اکسنتریک، کانسنتریک، حداکثر فلکشن ران و لحظه فرود) از دستگاه آنالیز حرکت استفاده شد. بهعنوان مداخله از بازخورد خارجی ترکیبی (بهصورت بصری و کلامی) در طول هشت هفته برنامه تمرینی پرشی و هنگام تکالیف حرکتی (پرش عمودی، تاک و کانترموومنت) استفاده شد. بهمنظور بازخورد بصری ابتدا فیلمهای آموزشی جهت اصلاح راستای نامناسب به افراد نشان داده شد سپس بازخورد کلامی (زانوها را بیشتر خم کنید، زانو را در راستای انگشتان پا قرار دهید، زانو را به سمت دیوار (منبع خارجی) فشار دهید)، اعمال شد (18, 19, 23). جهت ارزیابی کینماتیک اندام تحتانی حین تکالیف حرکتی پس از کالیبراسیون سیستم و قبل از انجام آزمون 18 مارکر بازتابنده آناتومیکی با قطر 15 میلیمتر در هر دو پا به روش پلاگین گیت بر روی سر متاتارسال دوم، قوزک خارجی، پشت پاشنه پا، قسمت میانی خارجی ساق پا، کندیل خارجی زانو، تروکانتر بزرگ، قسمت میانی خارجی فمور، خار خاصرهای قدامی فوقانی و خار خاصرهای خلفی فوقانی و دو مارکر اضافی بر روی مراکز کشککها جهت اندازهگیری والگوس پویای زانو (درمجموع 20 مارکر) برای هر فرد نصب شد. تمام فرایند ترکینگ مارکرها، پردازش سیگنالها و به دست آوردن کینماتیک سهبعدی با استفاده از نرمافزار متلب (Natick, Mathworks USA, version7.12.0) و Nexus (Version2.5) محاسبه شد و میانگین و حداکثر زوایا در هر سه صفحه حرکتی به دست آمد. همچنین بهمنظور ثبت متغیرهای کینماتیکی از سیستم آنالیز حرکت مجهز به 10 دوربین با فرکانس نمونهبرداری 250 هرتز استفاده شد. کینماتیک اندام تحتانی بهعنوان حرکت مفصل دیستال نسبت به رفرنس پروگزیمال تعریف و محاسبه شد. جهت محاسبه کینماتیک هیپ: حرکت فمور نسبت به لگن، کینماتیک زانو: حرکت تیبیا نسبت به فمور و کینماتیک مچ پا: حرکت مچ پا نسبت به تیبیا در نظر گرفته شد. در مطالعه حاضر میانگین و دامنه حرکتی مفاصل ران، زانو و مچ پا در صفحه ساجیتال، حین تکالیف پرش- فرود (پرش تاک، پرش عمودی و پرش کانترموومنت) در چهار مرحله اکسنتریک، کانسنتریک، حداکثر فلکشن زانو و مرحله لحظه فرود و میزان والگوس زانو محاسبه شد. در برنامه تمرینی دوماهه، هفتههای (3-1) تمرینات بر روی تکنیکهای اساسی مانند اسکات، لانچ و پرش از پهلوبهپهلو متمرکز بود. هفتههای (6-4)، تمرینات اساسی مانند پرش تاک، پرش اسکات، پرش یکپا و پرش روی زمین ناپایدار انجام شد. پسازآن، در مرحله عملکردی (8-7)، تمرینهای سختتر مانند حداکثر پرش و حرکات برشی و دویدن به افراد داده شد. برنامه تمرینی بهصورت سه جلسه در هفته به مدت 10 دقیقه، با یک دقیقه استراحت بین تکرارها، انجام شد (22). ضمن اینکه گروه مداخله برنامه تمرینی دوماهه را با بازخورد خارجی دریافت کردند. بهمنظور بررسی، تجزیهوتحلیل آماری دادههای خام بهدستآمده از تحقیق، از آمار توصیفی و استنباطی استفاده شد. برای توصیف ویژگیهای دموگرافی آزمودنیها از میانگین توصیفی و انحراف معیار و جهت بررسی طبیعی بودن توزیع دادهها از آزمون شاپیرو ویلک استفاده شد. با توجه به طبیعی بودن توزیع دادهها، پس از آنالیز، طبیعی سازی و فیلترینگ دادههای حاصل از کینماتیک اندام تحتانی با استفاده از نرمافزار متلب، برای تعیین تفاوتهای بین گروهی (گروه بازخوردی و گروه کنترل) و زمان (پیشآزمون و پسآزمون) از آزمون آماری میکس آنووا (Mixed Model ANOVA 2 ×2) برای هر تکلیف حرکتی و سپس مقایسه از طریق آزمون تعقیبی (بونفرونی) انجام شد. عامل درونگروهی بهعنوان اثر اصلی زمان و عامل بین گروهی بهعنوان اثر اصلی گروه در نظر گرفته شد. همچنین، از آزمون لون برای همگنی واریانس استفاده شد و 95 درصد فاصله اطمینان (CI95%) بر اساس اختلاف میانگین گروه تعدیلشده محاسبه شد و مقادیر اندازه اثر دی کوهن، 8/0، 5/0 و 2/0 بهعنوان اندازه اثر "بزرگ"، "متوسط" و "کوچک" در نظر گرفته شد. درنهایت دادههای خام حاصل از تحقیق در برنامه اکسل جمعبندی و با برنامه SPSS نسخه 21 (SPSS version 21, Microsoft Corp, Redmond, WA) مورد تجزیهوتحلیل قرار گرفتند.
نتایج
بررسی ویژگیهای دموگرافیکی نشان داد که در میانگین و انحراف معیار قد، وزن، سن، شاخص توده بدنی افراد بین دو گروه از نظر آماری تفاوت معناداری وجود ندارد (05/0<p) (جدول 1). در فاز اکسنتریک پرش عمودی، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی ران و زانو مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (44/1= اندازه اثر، 001/0=p)، زانو (12/1= اندازه اثر، 001/0=p) و مچ پا (81/0= اندازه اثر، 001/0=p) در مرحله اکسنتریک حین پرش عمودی داشته است. در فاز کانسنتریک پرش عمودی، اختلاف معناداری بین گروهی وجود نداشت. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی زانو (52/0= اندازه اثر، 045/0=p) در مرحله کانسنتریک حین پرش عمودی داشته است. در فاز حداکثر فلکشن زانو در پرش عمودی، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی ران و زانو مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (14/1= اندازه اثر، 001/0=p)، زانو (93/0= اندازه اثر، 001/0=p) و مچ پا (84/0= اندازه اثر، 001/0=p) در مرحله حداکثر فلکشن زانو حین پرش عمودی داشته است و در فاز لحظه فرود پرش عمودی، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو و مچ پا شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (15/1= اندازه اثر، 001/0=p)، زانو (75/1= اندازه اثر، 001/0=p) و مچ پا (82/1= اندازه اثر، 001/0=p) در مرحله لحظه فرود حین پرش عمودی داشته است (جدول 2).
در فاز اکسنتریک پرش تاک، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (86/0= اندازه اثر، 001/0=p)، زانو (97/0= اندازه اثر، 001/0=p) و مچ پا (90/0= اندازه اثر، 001/0=p) در مرحله اکسنتریک حین پرش تاک داشته است. در فاز کانسنتریک پرش تاک، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (80/0= اندازه اثر، 001/0=p)، زانو (08/1= اندازه اثر، 001/0=p) در مرحله کانسنتریک حین پرش تاک داشته است. در فاز حداکثر فلکشن زانو، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی ران، زانو و مچ پا مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (20/1= اندازه اثر، 001/0=p)، زانو (82/0= اندازه اثر، 001/0=p) و مچ پا (10/1= اندازه اثر، 001/0=p) در مرحله حداکثر فلکشن زانو حین پرش تاک داشته است و در فاز لحظه فرود پرش تاک، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو و مچ پا مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (98/0= اندازه اثر، 009/0=p)، زانو (03/2= اندازه اثر، 001/0=p) و مچ پا (12/1= اندازه اثر، 001/0=p) در مرحله لحظه فرود حین پرش تاک داشته است (جدول 3).
جدول 2. نتایج تغییرات دامنه حرکتی ران، زانو و مچ پای ورزشکاران قبل و بعد از هشت هفته تمرین حین پرش عمودی (انحراف استاندارد± میانگین)
| فاز | متغیر | گروه | پیشآزمون | پسآزمون | اندازه اثر (CI 95%) † |
p-value | ||||
| اثر اصلی زمان | اثر اصلی گروه | اثر متقابل گروه و زمان | ||||||||
اکسنتریک |
دامنه حرکتی ران صفحه ساجیتال (درجه) |
کنترل | 15/46±5/29 | 53/79±4/30 | 04/0 (87/0 تا 79/0-) |
529/14=F *001/0=P |
334/6=F *019/0=P |
293/8=F *001/0=P |
||
| بازخورد | 48/28±5/29 | ¥,a11/69±6/37 | £ 44/1 (20/2 تا 69/0) |
|||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) | کنترل | 62/77±10/41 | 78/38±11/40 | 07/0 (90/0 تا 76/0-) |
413/23=F *001/0=P |
218/6=F *023/0=P |
264/14=F *001/0=P |
|||
| بازخورد | 35/30±11/40 | ¥,a85/79±12/54 | £ 19/1 (92/1 تا 46/0) |
|||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 17/62±6/32 | 58/38±5/33 | 03/0 (87/0 تا 80/0-) |
843/8=F *001/0=P |
827/3=F 166/0=P |
200/5=F *019/0=P |
|||
| بازخورد | 79/81±6/32 | ¥ 11/94±8/38 | £ 81/0 (51/1 تا 11/0) |
|||||||
کانسنتریک |
دامنه حرکتی ران صفحه ساجیتال (درجه) | کنترل | 48/04±6/31 | 09/47±6/32 | 05/0 (91/0 تا 77/0-) |
167/5=F 088/0=P |
804/0=F 477/0=P |
974/2=F 152/0=P |
||
| بازخورد | 66/82±7/32 | 91/51±8/36 | 44/0 (12/1 تا 23/0-) |
|||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) | کنترل | 38/27±11/44 | 24/81±12/43 | 04/0 (92/0 تا 84/0-) |
966/5=F *045/0=P |
944/0=F 702/0=P |
667/3=F 116/0=P |
|||
| بازخورد | 86/90±12/43 | ¥33/01±10/50 | 52/0 (20/1 تا 16/0-) |
|||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 21/87±5/35 | 05/14±6/36 | 06/0 (89/0 تا 76/0-) |
762/4=F 104/0=P |
786/0=F 512/0=P |
501/2=F 263/0=P |
|||
| بازخورد | 17/44±6/36 | 42/24±8/39 | 37/0 (05/1 تا 29/0-) |
|||||||
حداکثر فلکشن زانو |
دامنه حرکتی ران صفحه ساجیتال (درجه) |
کنترل | 41/54±8/35 | 25/44±9/34 | 03/0 (88/0 تا 82/0-) |
136/28=F *001/0=P |
629/8=F *016/0=P |
480/13=F *001/0=P |
||
| بازخورد | 33/21±8/35 | ¥,a76/38±12/47 | £ 14/1 (87/1 تا 42/-) |
|||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) | کنترل | 04/22±11/45 | 16/86±12/45 | 02/0 (82/0 تا 79/0-) |
462/34=F *001/0=P |
568/10=F *009/0=P |
349/16=F *001/0=P |
|||
| بازخورد | 66/11±12/46 | ¥,a77/94±16/59 | £ 93/0 (61/1 تا 22/0) |
|||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 16/30±8/34 | 66/76±7/34 | 01/0 (85/0 تا 83/0-) |
512/7=F *001/0=P |
139/3=F 202/0=P |
032/5=F *028/0=P |
|||
| بازخورد | 10/41±9/35 | ¥ 25/55±10/43 | £ 84/0 (61/0 تا 14/1-) |
|||||||
لحظه فرود |
دامنه حرکتی ران صفحه ساجیتال (درجه) | کنترل | 68/01±4/28 | 44/60±4/27 | 03/0 (91/0 تا 84/0-) |
641/12=F *001/0=P |
616/4=F 120/0=P |
329/7=F *015/0=P |
||
| بازخورد | 71/84±4/27 | ¥20/57±5/33 | £ 15/1 (88/1 تا 42/0) |
|||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) | کنترل | 52/37±5/18 | 50/91±3/17 | 07/0 (91/0 تا 76/0-) |
083/26=F *001/0=P |
730/6=F *012/0=P |
408/10=F *001/0=P |
|||
| بازخورد | 90/21±4/18 | ¥,a29/13±6/28 | £ 75/1 (42/2 تا 89/0) |
|||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 93/55±3/11 | 21/00±3/12 | 05/0 (84/0 تا 77/0-) |
680/28=F *001/0=P |
510/7=F *006/0=P |
053/16=F *001/0=P |
|||
| بازخورد | 10/22±2/12 | ¥,a62/75±4/18 | £ 82/1 (61/2 تا 02/1) |
|||||||
جدول 3. نتایج تغییرات دامنه حرکتی ران، زانو و مچ پای ورزشکاران قبل و بعد از هشت هفته تمرین حین پرش تاک (انحراف استاندارد± میانگین)
| فاز | متغیر | گروه | پیشآزمون | پسآزمون | اندازه اثر (CI 95%) † |
p-value | ||||||
| اثر اصلی زمان | اثر اصلی گروه | اثر متقابل گروه و زمان | ||||||||||
اکسنتریک |
دامنه حرکتی ران صفحه ساجیتال (درجه) |
کنترل | 46/23±6/26 | 22/35±5/27 | 02/0 (56/0 تا 82/0-) |
161/6=F *038/0=P |
630/1=F 310/0=P |
426/3=F 092/0=P |
||||
| بازخورد | 16/01±5/28 | ¥11/89±6/32 | £ 86/0 (61/0 تا 14/1-) |
|||||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) | کنترل | 49/10±8/38 | 84/05±8/39 | 05/0 (94/0 تا 88/0-) |
309/17=F *001/0=P |
812/5=F 072/0=P |
538/9=F *001/0=P |
|||||
| بازخورد | 19/22±9/38 | ¥,a72/60±13/49 | £ 97/0 (72/1 تا 32/0) |
|||||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 30/12±4/28 | 47/11±4/27 | 03/0 (82/0 تا 76/0-) |
194/6=F *029/0=P |
238/1=F 316/0=P |
915/4=F 097/0=P |
|||||
| بازخورد | 16/56±5/28 | ¥ 10/22±7/33 | £ 90/0 (61/1 تا 20/0) |
|||||||||
کانسنتریک |
دامنه حرکتی ران صفحه ساجیتال (درجه) | کنترل | 18/92±5/33 | 29/60±5/32 | 03/0 (86/0 تا 80/0-) |
840/7=F *016/0=P |
009/1=F 307/0=P |
533/5=F *048/0=P |
||||
| بازخورد | 12/76±6/32 | ¥53/25±7/38 | £ 80/0 (49/1 تا 10/0) |
|||||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) | کنترل | 64/35±8/47 | 01/22±8/46 | 04/0 (82/0 تا 78/0-) |
553/10=F *001/0=P |
652/4=F 089/0=P |
253/6=F *010/0=P |
|||||
| بازخورد | 26/53±9/46 | ¥,a19/24±12/58 | £ 08/1 (80/1 تا 36/0) |
|||||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 33/84±6/35 | 96/22±5/35 | 01/0 (85/0 تا 83/0-) |
100/5=F 065/0=P |
859/0=F 435/0=P |
077/3=F 304/0=P |
|||||
| بازخورد | 66/70±5/35 | 88/09±6/39 | 53/0 (61/0 تا 14/1-) |
|||||||||
حداکثر فلکشن زانو |
دامنه حرکتی ران صفحه ساجیتال (درجه) | کنترل | 57/46±10/34 | 66/11±8/33 | 07/0 (95/0 تا 72/0-) |
403/33=F *001/0=P |
821/8=F *010/0=P |
569/18=F *001/0=P |
||||
| بازخورد | 04/87±10/33 | ¥,a03/50±14/48 | 20/1 (93/1 تا 47/0) |
|||||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) | کنترل | 44/70±12/46 | 45/13±13/47 | 08/0 (98/0 تا 66/0-) |
230/25=F *001/0=P |
094/6=F *023/0=P |
702/14=F *001/0=P |
|||||
| بازخورد | 91/52±10/47 | ¥,a23/07±14/58 | £ 82/0 (52/1 تا 12/0) |
|||||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 66/15±4/32 | 81/17±4/32 | 01/0 (83/0 تا 81/0-) |
700/12=F *001/0=P |
015/5=F *038/0=P |
263/8=F *008/0=P |
|||||
| بازخورد | 42/41±6/33 | ¥,a 33/62±8/41 | £ 10/1 (93/1 تا 47/0) |
|||||||||
لحظه فرود |
دامنه حرکتی ران صفحه ساجیتال (درجه) | کنترل | 77/86±5/26 | 29/10±5/26 | 00/0 (83/0 تا 83/0-) |
720/7=F *029/0=P |
427/3=F 265/0=P |
021/5=F 063/0=P |
||||
| بازخورد | 37/55±4/25 | ¥72/11±6/31 | £ 98/0 (13/1 تا 14/0) |
|||||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) | کنترل | 19/55±3/16 | 42/84±3/16 | 01/0 (81/0 تا 79/0-) |
144/30=F *001/0=P |
400/8=F *009/0=P |
622/17=F *001/0=P |
|||||
| بازخورد | 88/30±3/17 | ¥,a92/46±5/27 | £ 03/2 (85/2 تا 20/1) |
|||||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 11/41±2/13 | 67/24±3/12 | 03/0 (80/0 تا 85/0-) |
729/10=F *001/0=P |
109/2=F 380/0=P |
557/6=F *037/0=P |
|||||
| بازخورد | 44/59±3/13 | ¥,a20/91±4/17 | £ 12/1 (84/1 تا 40/0) |
|||||||||
نتایج بهصورت میانگین ± انحراف استاندارد بیان شده است؛ *، اختلاف آماری معنادار (05/0>P)؛ ¥، اختلاف معنادار پیشآزمون به پسآزمون؛ †، اندازه اثر (%95 فاصله اطمینان)؛ £، اندازه اثر بزرگ دی کوهن (8/0)؛ نتایج آزمون تعقیبی بونفرونی: a = تفاوت معنادار بین گروه بازخوردی و گروه کنترل
در فاز اکسنتریک پرش کانترموومنت، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی ران، زانو و مچ پا مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (59/1= اندازه اثر، 001/0=p)، زانو (15/1= اندازه اثر، 001/0=p) و مچ پا (20/1= اندازه اثر، 001/0=p) در مرحله اکسنتریک حین پرش کانترموومنت داشته است. در فاز کانسنتریک پرش کانترموومنت، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی زانو (87/0= اندازه اثر، 001/0=p) در مرحله کانسنتریک حین پرش کانترموومنت داشته است. در فاز حداکثر فلکشن زانو پرش کانترموومنت، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (67/0= اندازه اثر، 001/0=p)، زانو (84/0= اندازه اثر، 001/0=p) و مچ پا (72/0= اندازه اثر، 001/0=p) در مرحله حداکثر فلکشن زانو حین پرش کانترموومنت داشته است و در فاز لحظه فرود پرش کانترموومنت، اختلاف معناداری بین گروه بازخوردی و کنترل در دامنه حرکتی زانو و مچ پا مشاهده شد. همچنین آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی افزایش معناداری در دامنه حرکتی ران (16/1= اندازه اثر، 001/0=p)، زانو (99/1= اندازه اثر، 001/0=p) و مچ پا (69/1= اندازه اثر، 001/0=p) در مرحله لحظه فرود حین پرش کانترموومنت داشته است (جدول 4).
همچنین نتایج کینماتیک صفحه فرونتال نشان داد که در پرش عمودی، اختلاف معناداری در زاویه والگوس زانو بین گروه بازخوردی و کنترل مشاهده شد. آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی بهبود معناداری در مقدار زاویه والگوس نسبت به پیشآزمون خود داشته است (23/1= اندازه اثر، 001/0=p)، در پرش تاک، اختلاف معناداری در زاویه ابداکشن زانو بین گروه بازخوردی و کنترل مشاهده شد. آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی کاهش معناداری در زاویه والگوس زانو نسبت به پیشآزمون خود داشته است (16/1= اندازه اثر، 001/0=p) و در پرش کانترموومنت، اختلاف معناداری در زاویه ابداکشن زانو بین گروه بازخوردی و کنترل مشاهده نشد. آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی کاهش معناداری در زاویه والگوس زانو نسبت به پیشآزمون خود داشته است (73/0= اندازه اثر، 001/0=p) (جدول 5).
نتایج بهصورت میانگین ± انحراف استاندارد بیان شده است؛ *، اختلاف آماری معنادار (05/0>P)؛ ¥، اختلاف معنادار پیشآزمون به پسآزمون؛ †، اندازه اثر (%95 فاصله اطمینان)؛ £، اندازه اثر بزرگ دی کوهن (8/0)؛ نتایج آزمون تعقیبی بونفرونی: a = تفاوت معنادار بین گروه بازخوردی و گروه کنترل
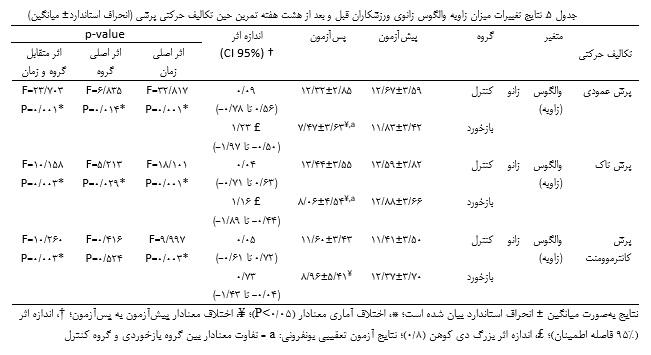
همچنین نتایج کینماتیک صفحه فرونتال نشان داد که در پرش عمودی، اختلاف معناداری در زاویه والگوس زانو بین گروه بازخوردی و کنترل مشاهده شد. آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی بهبود معناداری در مقدار زاویه والگوس نسبت به پیشآزمون خود داشته است (23/1= اندازه اثر، 001/0=p)، در پرش تاک، اختلاف معناداری در زاویه ابداکشن زانو بین گروه بازخوردی و کنترل مشاهده شد. آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی کاهش معناداری در زاویه والگوس زانو نسبت به پیشآزمون خود داشته است (16/1= اندازه اثر، 001/0=p) و در پرش کانترموومنت، اختلاف معناداری در زاویه ابداکشن زانو بین گروه بازخوردی و کنترل مشاهده نشد. آزمون تعقیبی بونفرونی نشان داد گروه بازخوردی کاهش معناداری در زاویه والگوس زانو نسبت به پیشآزمون خود داشته است (73/0= اندازه اثر، 001/0=p) (جدول 5).
جدول 4. نتایج تغییرات دامنه حرکتی ران، زانو و مچ پای ورزشکاران قبل و بعد از هشت هفته تمرین حین پرش کانترموومنت (انحراف استاندارد± میانگین)
| فاز | متغیر | گروه | پیشآزمون | پسآزمون | اندازه اثر (CI 95%) † |
p-value | |||
| اثر اصلی زمان | اثر اصلی گروه | اثر متقابل گروه و زمان | |||||||
اکسنتریک |
دامنه حرکتی ران صفحه ساجیتال (درجه) |
کنترل | 56/18±7/29 | 15/41±8/29 | 01/0 (85/0 تا 82/0-) |
716/30=F *001/0=P |
144/6=F *005/0=P |
430/19=F *001/0=P |
|
| بازخورد | 22/44±8/30 | ¥,a68/59±10/45 | £ 59/1 (36/2 تا 81/0) |
||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) |
کنترل | 66/88±10/42 | 02/57±11/43 | 02/0 (80/0 تا 84/0-) |
622/36=F *001/0=P |
103/8=F *001/0=P |
499/24=F *001/0=P |
||
| بازخورد | 77/19±11/43 | ¥,a21/88±15/58 | £ 1508/1 (88/1 تا 42/0) |
||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 72/54±6/31 | 84/01±6/32 | 04/0 (91/0 تا 76/0-) |
510/26=F *001/0=P |
621/5=F *043/0=P |
701/11=F *001/0=P |
||
| بازخورد | 32/12±6/31 | ¥,a 16/28±10/41 | £ 20/1 (94/1 تا 47/0) |
||||||
کانسنتریک |
دامنه حرکتی ران صفحه ساجیتال (درجه) |
کنترل | 21/60±8/35 | 86/14±8/36 | 02/0 (89/0 تا 77/0-) |
087/5=F 100/0=P |
668/0=F 453/0=P |
715/2=F 298/0=P |
|
| بازخورد | 49/44±10/36 | 63/50±11/42 | 54/0 (23/1 تا 13/1-) |
||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) |
کنترل | 41/32±10/46 | 89/33±9/45 | 02/0 (80/0 تا 88/0-) |
350/11=F *001/0=P |
322/5=F *047/0=P |
866/6=F *004/0=P |
||
| بازخورد | 74/21±9/45 | ¥,a39/00±14/56 | £ 87/0 (58/1 تا 17/0) |
||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 47/22±7/37 | 88/55±7/36 | 02/0 (84/0 تا 75/0-) |
216/5=F 059/0=P |
892/0=F 466/0=P |
116/3=F 288/0=P |
||
| بازخورد | 56/08±6/37 | 90/19±8/42 | 65/0 (34/1 تا 03/0-) |
||||||
حداکثر فلکشن زانو |
دامنه حرکتی ران صفحه ساجیتال (درجه) | کنترل | 94/66±8/35 | 32/25±9/36 | 03/0 (94/0 تا 75/0-) |
222/14=F *001/0=P |
119/5=F 072/0=P |
629/8=F 006/0=P |
|
| بازخورد | 55/29±8/35 | ¥20/74±11/43 | 67/0 (61/0 تا 14/1-) |
||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) | کنترل | 30/54±10/46 | 52/04±9/46 | 01/0 (84/0 تا 83/0-) |
485/22=F *001/0=P |
556/7=F *020/0=P |
112/16=F *001/0=P |
||
| بازخورد | 63/12±10/46 | ¥,a92/38±12/57 | £ 84/0 (55/1 تا 14/0) |
||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 11/50±6/34 | 75/34±6/33 | 01/0 (82/0 تا 85/0-) |
565/9=F *001/0=P |
023/4=F 108/0=P |
167/5=F *029/0=P |
||
| بازخورد | 63/22±5/34 | ¥ 45/02±7/39 | 72/0 (42/1 تا 03/0) |
||||||
لحظه فرود |
دامنه حرکتی ران صفحه ساجیتال (درجه) | کنترل | 84/42±4/25 | 60/23±4/25 | 00/0 (84/0 تا 83/0-) |
920/11=F *001/0=P |
156/4=F 138/0=P |
475/8=F *001/0=P |
|
| بازخورد | 22/09±5/26 | ¥66/94±6/32 | £ 16/1 (88/1 تا 43/0) |
||||||
| دامنه حرکتی زانو صفحه ساجیتال (درجه) | کنترل | 76/91±4/18 | 29/59±4/18 | 01/0 (85/0 تا 82/0-) |
777/33=F *001/0=P |
633/7=F *003/0=P |
912/21=F *001/0=P |
||
| بازخورد | 81/04±4/19 | ¥,a22/13±6/30 | £ 99/1 (81/2 تا 17/1) |
||||||
| دامنه حرکتی مچ پا صفحه ساجیتال (درجه) |
کنترل | 03/55±3/13 | 36/18±3/14 | 02/0 (88/0 تا 77/0-) |
442/13=F *001/0=P |
849/5=F *039/0=P |
001/8=F *001/0=P |
||
| بازخورد | 71/92±3/13 | ¥,a07/43±5/21 | £ 69/1 (47/2 تا 90/0) |
||||||
این مطالعه با هدف بررسی اثر هشت هفته تمرین بازخوردی بر متغیرهای کینماتیکی ورزشکاران مرد با نقص کنترل حرکتی (والگوس پویا زانو و غلبه چهار سر ران) در تکالیف پرش فرود انجام شد. بهطورکلی نتایج مطالعه حاضر بر اساس آزمون آماری آنالیز واریانس دوطرفه نشان داد که بهطورکلی نتایج مطالعه حاضر بر اساس آزمون آماری آنالیز واریانس دوطرفه نشان داد که هشت هفته برنامه تمرینی بازخورد بر کینماتیک ران، زانو و مچ پا در ورزشکاران با نقصهای کنترل حرکتی (والگوس پویای زانو و غلبه چهارسرران) حین تکالیف حرکتی پرش-فرود (پرش عمودی، پرش تاک و پرش کانترموومنت) تأثیر معناداری دارد. بهطور دقیقتر در هر سه پرش در سه مرحله (اکسنتریک، حداکثر فلکشن زانو و لحظه فرود) گروه بازخوردی افزایش معناداری در دامنه حرکتی هیپ، زانو و مچ پا داشته است. در فاز کانسنتریک پرشهای عمودی و کانترموومنت بازخوردی افزایش معناداری در دامنه حرکتی زانو و در فاز کانسنتریک پرش تاک گروه بازخوردی افزایش معناداری در دامنه حرکتی ران و زانو داشت این به معنای اثربخشی بیشتر پرش تاک در فاز کانسنتریک نسبت به دو پرش دیگر است. 25 درصد اول فاز اتکا برای تجزیهوتحلیل انتخاب شد (مرحله اکسنتریک) زیرا اوج بارگذاری رباط صلیبی قدامی در 60 میلیثانیه اول هنگام فرود تخمین زده شده است (24). از طرفی مشخص شده که کاهش دامنه حرکتی مفاصل اندام تحتانی در صفحه ساجیتال منجر به والگوس زانو شده که خطر آسیب رباط صلیبی قدامی را افزایش میدهد (25). در مطالعه حاضر بازخورد باعث بهبود دامنه حرکتی مفاصل اندام تحتانی در تمامی مراحل شد که این نتایج با مطالعات بسیاری در این زمینه همسو است. هرچند مطالعات محدودی به بررسی کینماتیک اندام تحتانی در چهار مرحله پرداختهاند اکثر مطالعات کینماتیک را در مرحله حداکثر فلکشن زانو بررسی کردهاند. همچنین آزمون آماری آنالیز واریانس دوطرفه نشان داد که هشت هفته برنامه تمرینی بازخورد بر میزان جابهجایی داخلی زانو در ورزشکاران با نقصهای کنترل حرکتی (والگوس پویای زانو و غلبه چهارسرران) حین تکالیف حرکتی پرش-فرود (پرش عمودی، پرش تاک و پرش کانترموومنت) تأثیر معناداری دارد. بهطور دقیقتر نتایج بازخورد در هر سه پرش بر میزان جابهجایی داخلی زانو یکسان بود. در مطالعهای از اریکسون و همکاران (2016) افزایش دامنه حرکتی زانو و ران را در گروه بازخورد شاهد بودیم ضمن اینکه این بهبود در گروه بازخورد ترکیبی نسبت گروههای بازخورد سنتی بیشتر بوده است که مطابق با نتایج مطالعه حاضر است (26). در این مطالعه بازخورد سنتی و بازخورد ترکیبی(سنتی و بازخورد در زمان واقعی) را به مدت چهار هفته و همچنین یک هفته بدون بازخورد (بهمنظور بررسی حفظ اثر بازخورد) بررسی کردند. گروه بازخورد ترکیبی افزایش فلکشن زانو و ران را به ترتیب 3/11 درجه و 9/10 درجه نشان دادند. همچنین نیروی عمودی واکنش زمین در هر دو گروه کاهش یافت. همچنین این مطالعه گزارش کرده است که گروهها قادر به حفظ تغییرات بیومکانیکی بهدستآمده پس از مداخله 4 هفتهای و پس از 1 هفته بدون حفظ بازخورد، نبودند. هرچند که گروه بازخورد ترکیبی نسبت به بازخورد سنتی در حفظ تغییرات بیومکانیکی برتر بود. بر طبق نتایج مطالعه بالا، بااینکه در مطالعه حاضر هشت هفته تمرین بازخوردی باعث بهبود کینماتیک اندام تحتانی شد اما برای یافتن این سؤال که آیا افراد قادر به حفظ تغییرات بیومکانیکی هستند یا خیر مطالعه دیگری نیاز است. در مطالعه فاوری و همکاران (2016) که به بررسی اصلاح فلکشن زانو بر عوامل خطر آسیب رباط صلیبی قدامی در ورزشکاران سالم پرداخته بود، دامنه حرکتی زانو در فاز حداکثر فلکشن زانو افزایش یافت. زاویه فلکشن زانو پس از اصلاح بهطور قابلتوجهی از 2/11 درجه به 2/15 درجه در تماس اولیه و از 8/67 درجه به 7/100 درجه در حداکثر فلکشن زانو افزایش یافت و زمان بین تماس اولیه و حداکثر فلکشن از 4/177 به 4/399 میلیثانیه افزایش یافت. اصلاح فلکشن باعث کاهش قابلتوجهی در نیروی واکنش عمودی زمین با کاهش همزمان در حداکثر گشتاور خمشی شد. اما نکته جالبتوجه در این مطالعه این بود که اصلاح فلکشن زانو، زاویه و گشتاور ابداکشن را فقط در افرادی که در یک موقعیت اداکشن اولیه فرود آمدند تحت تأثیر قرار داد و در افرادی که با یک موقعیت ابداکشن اولیه فرود آمدند تأثیری نداشت. بنابراین مطالعه پیشنهاد داده که برای که انتخاب مداخلات جهت جلوگیری از آسیبهای رباط صلیبی قدامی باید ویژگیهای خاص بیمار را در نظر گرفت (27). در مطالعه حاضر افزایش فلکشن زانو و کاهش اداکشن زانو بهصورت همزمان بهعنوان دستورالعملی برای فرود، میزان ابداکشن زانو را تحت تأثیر قرار داد و موجب کاهش آن شد که از این نظر با مطالعه فاوری و همکاران (2016)در تضاد است. مطالعات بازخوردی بیشتر به کینماتیک و کینتیک صفحه ساجیتال پرداختهاند بااینحال برخی مطالعات کینماتیک و کینتیک صفحه فرونتال را هم مورد بررسی قرار دادهاند، بهطور مثال اریکسون و همکاران (2015) طی مطالعهای تأثیر بازخورد در زمان واقعی بر روی کینماتیکهای پرش فرود ورزشکاران را بررسی کردند. در مطالعه آنها هیچ تغییری بین گروههای بازخوردی در زاویه والگوس زانو مشاهده نشد که با نتایج مطالعه حاضر همسو نیست (24). مطالعه اریکسون بازخورد را در کوتاهمدت و بر روی زنان بررسی کرده است که ممکن است تفاوت در نتایج ناشی از آن باشد. همچنین نوع بازخورد در مطالعات ما هم متفاوت بود. در مطالعه دیگری مارشال و همکاران (2020) اثر بازخورد بصری بر کینماتیک اندام تحتانی افراد با والگوس پویا را بررسی کردند، که درنهایت بازخورد باعث کاهش میزان والگوس زانو شد بهطور دقیقتر پس از مداخله، گروه بازخورد 03/13 درجه بیشتر فلکشن زانو را در طول 100 میلیثانیه اول قبل از تماس اولیه و 16/6 درجه کمتر ابداکشن زانو 200 میلیثانیه پس از تماس اولیه نسبت به گروه کنترل نشان دادند. گروه بازخورد همچنین کاهش 02/3 درجهای در اوج ابداکشن زانو در مقایسه با مقادیر پایه نشان داد (20). در مطالعه مارشال گزارش شد که انجام یک جلسه تمرینی باعث تغییر در الگوی حرکتی افراد و کاهش والگوس پویا حین تکالیف پویا خواهد شد. همچنین در مطالعه دیگر اثر هشت هفته تمرینات عصبی عضلانی با تمرکز بیرونی بر مردانی که بازسازی رباط صلیبی قدامی انجام داده بودند بررسی شد. در گروه تجربی کاهشی در حداکثر والگوس زانو، حداکثر نیروی برشی قدامی تیبیا حداکثر گشتاور ابداکشن زانو، مشاهده شد که با نتایج این مطالعه همسو است (28). البته در این راستا اریکسن و همکاران (2016) افرادی را که در یک برنامه بازخورد 4 هفتهای با تمرکز بر پرش عمودی شرکت کرده بودند، مورد مطالعه قرار دادند. هرچند آنها تغییرات پایدار پس از مداخله را مشاهده نکردند، اما قبل از مداخله، حرکت کینماتیکی معیوب را غربال نکردند. بنابراین، ممکن است تفاوتها در شرکتکنندگانی که الگوهای حرکتی معیوب نداشتند، پنهان شده باشد که ممکن است اختلاف در نتایج به همین دلیل باشد (26).
از محدودیتهای مطالعه حاضر میتوان به این موارد اشاره کرد، عدم بررسی کینتیک زانو جهت بررسی گشتاورها حین تکالیف پرشی و با توجه به اینکه شرکتکنندگان در پژوهش حاضر مردان فعال بودند، نتایج حاصل از این تحقیق را نمیتوان به همه افراد از جمله زنان، افراد مسن و یا با شاخص توده بدنی بالا تعمیم داد؛ بنابراین پیشنهاد میشود، شاخصهای کینتیکی از جمله گشتاورها نیز حین تکالیف عملکردی با شدتهای متفاوت جهت ارائه اطلاعات دقیقتر از مؤثر بودن مداخله در طراحی پروتکلهای تمرینی بررسی شود. همچنین ازآنجاییکه نسبت فعالیت عضلات همسترینگ داخلی بر خارجی بر میزان والگوس زانو اثرگذار است بنابراین در تحقیقی دیگر علاوه براثر بازخورد بر عضلات همسترینگ خارجی اثر آن بر عضلات همسترینگ داخلی هم مشخص شود. همچنین در تحقیقی دیگر اثر بازخورد در تکالیف پرشی مختلف به فرض مثال فرودهای تک پا را بررسی کنند و به مقایسه نتایج حاصل از آنها با تکالیف فرود دو پا بپردازند. بهعلاوه با توجه به اینکه عوامل زیادی همانند طول مدت بازخورد، نوع بازخورد و نوع فعالیتهای عملکردی، بر نتایج حاصل از بازخورد اثرگذارند پیشنهاد میشود این مداخله در دورههای مختلف بهطور مثال قبل از فصل مسابقات یا بعد از آن بررسی شود و نتایج حاصل از آنها مقایسه شود. همچنین در مطالعه مشابه دیگری این موضوع بررسی شود که آیا در افراد ورزشکار حرفهای که یادگیری آنها بالا بوده و یا خیلی ثابت شده است این تغییرات رخ میدهد یا خیر؟ و اینکه آیا این تمرینات در فعالیت ورزشی فرد تغییر ایجاد میکند و در حین فعالیت ورزشی باقی میماند و یا فقط در محیط آزمایشگاهی باقی میماند؟
نتیجه گیری نهایی
هشت هفته برنامه تمرینی بازخورد بر کینماتیک هیپ، زانو و مچ پا در ورزشکاران با نقصهای کنترل حرکتی (والگوس پویای زانو و غلبه چهارسرران) حین تکالیف حرکتی پرش-فرود (پرش عمودی، پرش تاک و پرش کانترموومنت) تأثیر معناداری دارد و بازخورد باعث افزایش دامنه حرکتی در مفاصل اندام تحتانی و درنتیجه کاهش آسیب رباط صلیبی قدامی میشود. هشت هفته برنامه تمرینی بازخورد بر میزان زاویه والگوس زانو در ورزشکاران با نقصهای کنترل حرکتی (والگوس پویای زانو و غلبه چهارسرران) حین تکالیف حرکتی پرش-فرود (پرش عمودی، پرش تاک و پرش کانترموومنت) تأثیر معناداری دارد بنابراین بازخورد باعث کاهش زاویه والگوس در هر سه پرش میشود و بیشترین اثرگذاری مربوط به پرش عمودی است.
تشکر و قدردانی
نویسندگان مایلند از همه شرکتکنندگان و کارکنان آزمایشگاه تحلیل حرکت برای همکاری جهت انجام این مطالعه تشکر کنند.
ملاحظات اخلاقی
پیروی از اصول اخلاق پژوهش
ملاحظات اخلاقی این مطالعه حاصل رساله مقطع دکتری با کد اخلاق (IR.GUILAN.REC.1402.001) از دانشگاه گیلان بود. کلیه استانداردهای اخلاقی حاکم بر تحقیقات بالینی، مانند کسب رضایت آگاهانه و آزادانه، عـدم آسیب به مشارکتکنندگان، محرمانه بودن اطلاعات، آگـاهی از انصـراف از مطالعـه در هـر زمـان، حـریم خصوصی و عدالت رعایت شده است.
حامی مالی
این مطالعه حاصل رساله دکتری دانشگاه گیلان بوده و از هیچ سازمان دیگری حمایت مالی دریافت ننموده است.
مشارکت نویسندگان
جمعآوری و ترکیب دادهها توسط محدثه اشرفی زاده؛ مفهومسازی، ایده سازی، طراحی مطالعه و ویرایش توسط همه نویسندگان انجام شد.
تعارض
نویسندگانی که نام آنها ذکر شده است گواهی میدهند که به جز دانشگاه گیلان و دانشگاه علوم پزشکی گیلان هیچ وابستگی یا مشارکتی با هیچ سازمان یا نهادی با هرگونه منافع مالی (مانند حقالزحمه، کمکهزینه تحصیلی، مشارکت در دفتر سخنرانان، عضویت، استخدام، مشاوره، مالکیت سهام، یا سایر منافع سهام؛ ترتیبات صدور مجوز ثبت اختراع)، یا منافع غیرمالی (مانند روابط شخصی یا حرفهای، وابستگیها، دانش یا اعتقادات) در موضوع یا مواد مورد بحث در این دستنوشته، نداشتهاند.
فهرست منابع
1. Arundale AJ, Silvers‐Granelli HJ, Myklebust GJJoOR. ACL injury prevention: Where have we come from and where are we going? 2022;40(1):43-54. [DOI:10.1002/jor.25058] [PMID]
2. Jeong J, Choi D-H, Shin CSJTAjosm. Core strength training can alter neuromuscular and biomechanical risk factors for anterior cruciate ligament injury. 2021;49(1):183-92. [DOI:10.1177/0363546520972990] [PMID]
3. He X, Huang WY, Leong HT, Qiu JH, Ma CC, Fu S-C, et al. Decreased passive muscle stiffness of vastus medialis is associated with poorer quadriceps strength and knee function after anterior cruciate ligament reconstruction. 2021;82:105289. [DOI:10.1016/j.clinbiomech.2021.105289] [PMID]
4. Larwa J, Stoy C, Chafetz RS, Boniello M, Franklin CJIjoer, health p. Stiff landings, core stability, and dynamic knee valgus: a systematic review on documented anterior cruciate ligament ruptures in male and female athletes. 2021;18(7):3826. [DOI:10.3390/ijerph18073826] [PMID]
5. Cohen D, Yao PF, Uddandam A, de Sa D, Arakgi MEJCRiMM. Etiology of Failed Anterior Cruciate Ligament Reconstruction: a Scoping Review. 2022;15(5):394-401. [DOI:10.1007/s12178-022-09776-1] [PMID]
6. Baker HP, Bowen E, Sheean A, Bedi AJJ. New Considerations in ACL Surgery: When Is Anatomic Reconstruction Not Enough? 2023:10.2106. [DOI:10.2106/JBJS.22.01079] [PMID]
7. Sahabuddin FNA, Jamaludin NI, Bahari MLHS, Najib RKMRA, Shaharudin SJJoPE, Sport. Lower limb biomechanics during drop vertical jump at different heights among university athletes. 2021;21(4):1829-35.
8. Heinert BL, Collins T, Tehan C, Ragan R, Kernozek TWJIJoSM. Effect of hamstring-to-quadriceps ratio on knee forces in females during landing. 2021;42(03):264-9. [DOI:10.1055/a-1128-6995] [PMID]
9. Letafatkar A, Rajabi R, Minoonejad H, Rabiei PJIJoSPT. Efficacy of perturbation-enhanced neuromuscular training on hamstring and quadriceps onset time, activation and knee flexion during a tuck-jump task. 2019;14(2):214. [DOI:10.26603/ijspt20190214] [PMID]
10. Dedinsky R, Baker L, Imbus S, Bowman M, Murray LJIjospt. Exercises that facilitate optimal hamstring and quadriceps co-activation to help decrease ACL injury risk in healthy females: A systematic review of the literature. 2017;12(1):3.
11. Lindblom H, Hägglund M, Sonesson SJPtis. Intra-and interrater reliability of subjective assessment of the drop vertical jump and tuck jump in youth athletes. 2021;47:156-64. [DOI:10.1016/j.ptsp.2020.11.031] [PMID]
12. Baellow A, Glaviano NR, Hertel J, Saliba SAJJoAT. Lower extremity biomechanics during a drop-vertical jump and muscle strength in women with patellofemoral pain. 2020;55(6):615-22. [DOI:10.4085/1062-6050-476-18] [PMID]
13. Konrad A, Reiner MM, Bernsteiner D, Glashüttner C, Thaller S, Tilp MJIJoER, et al. Joint flexibility and isometric strength parameters are not relevant determinants for countermovement jump performance. 2021;18(5):2510. [DOI:10.3390/ijerph18052510] [PMID]
14. Oñate JA, Guskiewicz KM, Marshall SW, Giuliani C, Yu B, Garrett WEJTAjosm. Instruction of jump-landing technique using videotape feedback: altering lower extremity motion patterns. 2005;33(6):831-42. [DOI:10.1177/0363546504271499] [PMID]
15. Herman DC, Oñate JA, Weinhold PS, Guskiewicz KM, Garrett WE, Yu B, et al. The effects of feedback with and without strength training on lower extremity biomechanics. 2009;37(7):1301-8. [DOI:10.1177/0363546509332253] [PMID]
16. Neilson V, Ward S, Hume P, Lewis G, McDaid AJPTiS. Effects of augmented feedback on training jump landing tasks for ACL injury prevention: A systematic review and meta-analysis. 2019;39:126-35. [DOI:10.1016/j.ptsp.2019.07.004] [PMID]
17. Armitano CN, Haegele JA, Russell DMJJoAT. The use of augmented information for reducing anterior cruciate ligament injury risk during jump landings: a systematic review. 2018;53(9):844-59. [DOI:10.4085/1062-6050-320-17] [PMID]
18. Leonard KA, Simon JE, Yom J, Grooms DRJIJoSPT. The immediate effects of expert and dyad external focus feedback on drop landing biomechanics in female athletes: An instrumented field study. 2021;16(1):96. [DOI:10.26603/001c.18717]
19. Benjaminse A, Postma W, Janssen I, Otten EJJoat. Video feedback and 2-dimensional landing kinematics in elite female handball players. 2017;52(11):993-1001. [DOI:10.4085/1062-6050-52.10.11] [PMID]
20. Marshall AN, Hertel J, Hart JM, Russell S, Saliba SAJJoAT. Visual biofeedback and changes in lower extremity kinematics in individuals with medial knee displacement. 2020;55(3):255-64. [DOI:10.4085/1062-6050-383-18] [PMID]
21. Begalle RL, DiStefano LJ, Blackburn T, Padua DAJJoat. Quadriceps and hamstrings coactivation during common therapeutic exercises. 2012;47(4):396-405. [DOI:10.4085/1062-6050-47.4.01] [PMID]
22. Aerts I, Cumps E, Verhagen E, Wuyts B, Van De Gucht S, Meeusen RJJosr. The effect of a 3-month prevention program on the jump-landing technique in basketball: a randomized controlled trial. 2015;24(1):21-30. [DOI:10.1123/jsr.2013-0099] [PMID]
23. Lussow KN. The Effect of Externally-focused Feedback versus Internally-focused Feedback on Dynamic Knee Valgus During a Single Leg Squat: The University of Toledo; 2020.
24. Ericksen HM, Thomas AC, Gribble PA, Doebel SC, Pietrosimone BGJjoo, therapy sp. Immediate effects of real-time feedback on jump-landing kinematics. 2015;45(2):112-8. [DOI:10.2519/jospt.2015.4997] [PMID]
25. de Britto MA, Lemos AL, Dos Santos CS, Stefanyshyn DJ, Carpes FPJTJoS, Research C. Effect of a compressive garment on kinematics of jump-landing tasks. 2017;31(9):2480-8. [DOI:10.1519/JSC.0000000000001620] [PMID]
26. Ericksen HM, Thomas AC, Gribble PA, Armstrong C, Rice M, Pietrosimone BJCB. Jump-landing biomechanics following a 4-week real-time feedback intervention and retention. 2016;32:85-91. [DOI:10.1016/j.clinbiomech.2016.01.005] [PMID]
27. Favre J, Clancy C, Dowling AV, Andriacchi TPJTAjosm. Modification of knee flexion angle has patient-specific effects on anterior cruciate ligament injury risk factors during jump landing. 2016;44(6):1540-6. [DOI:10.1177/0363546516634000] [PMID]
28. Ghaderi M, Letafatkar A, Thomas AC, Keyhani SJBSS, Medicine, Rehabilitation. Effects of a neuromuscular training program using external focus attention cues in male athletes with anterior cruciate ligament reconstruction: A randomized clinical trial. 2021;13(1):1-11. [DOI:10.1186/s13102-021-00275-3] [PMID]
| بازنشر اطلاعات | |
 |
این مقاله تحت شرایط Creative Commons Attribution-NonCommercial 4.0 International License قابل بازنشر است. |

تماس با ما
فصلنامه بیومکانیک ورزشی
همدان،شهرک مدنی، بلوار امام خمینی(ره)، بلوار پروفسور موسیوند، مجتمع دانشگاه آزاد اسلامی واحد همدان، معاونت پژوهش و فناوری، دفتر مجلات علمی
صندوق پستی: 734
تلفن دفتر نشریه: 08134494042
وبسایت: http://biomechanics.iauh.ac.ir
ایمیل: sportbiomechanics@iauh.ac.ir