دوره 10، شماره 1 - ( 3-1403 )
جلد 10 شماره 1 صفحات 81-70 |
برگشت به فهرست نسخه ها



![]()
![]()
![]()
Download citation:
BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:



BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:
Yousefian Molla R, Sadeghi H. Comparison of the Three-Dimensional Mechanical Power of Dominant Lower Limb Joints during Walking. J Sport Biomech 2024; 10 (1) :70-81
URL: http://biomechanics.iauh.ac.ir/article-1-338-fa.html
URL: http://biomechanics.iauh.ac.ir/article-1-338-fa.html
یوسفیان ملا راضیه، صادقی حیدر. مقایسه توان مکانیکی سهبعدی مفاصل پای برتر حین راه رفتن. مجله بیومکانیک ورزشی. 1403; 10 (1) :70-81



1- گروه بیومکانیک ورزشی، دانشگاه آزاد اسلامی واحد تهران مرکزی، تهران، ایران.
2- گروه آسیب شناسی و بیومکانیک ورزشی، دانشگاه خوارزمی، تهران، ایران.
2- گروه آسیب شناسی و بیومکانیک ورزشی، دانشگاه خوارزمی، تهران، ایران.
متن کامل [PDF 1912 kb]
(363 دریافت)
| چکیده (HTML) (995 مشاهده)
متن کامل: (528 مشاهده)
مقدمه
توان عضلات اسکلتی، امروزه بهعنوان یکی از پارامترهای عضلانی منحصربهفرد و مجزا از قدرت عضلانی شناخته میشود و محصولی از نیروی دینامیکی عضله و سرعت انقباض آن است (1). توان عضله و ارتباط آن با توانایی عملکردی، هم به سرعت انقباض و هم به بزرگی مقاومت به کار گرفته شده وابسته است (2). تحقیقات نشان دادهاند که توان عضله، یک پیشگوی مناسب برای توانایی افراد در کنترل اندام تحتانی بوده، چراکه شامل ترکیبی از اطلاعات کینتیکی و کینماتیکی مفاصل و عضلات است (3، 4) و از طریق مدلهای بیومکانیکی (مانند مدل سگمنتی) و داینامیک معکوس، مشارکت گروههای عضلانی اصلی توسط آن میتواند، محاسبه شود. شبکه توان مفصلی (حاصلضرب گشتاور مفصل و سرعت زاویهای آن) نیز حاکی از تولید انقباض کانسنتریک لحظهای در گروههای عضلانی، همراه با انقباض اکسنتریک در همان عضلات است که در طی حرکاتی مانند راه رفتن جذب میشود. بهعلاوه، یکپارچگی منحنی توان مفصل میتواند برای تعیین مقدار کلی کار انجام شده مورد استفاده قرار گیرد، به صورتی که انقباض کانسنتریک عضله، حاکی از کار مثبت و انقباض اکسنتریک آن حاکی از کار منفی است (5).
در راه رفتن افراد سالم، توان مکانیکی، از جمله فاکتورهای مهمی است که جهت ارزیابی این فعالیت مورد استفاده قرار میگیرد و تغییرات آن، متعاقب تغییرات در راه رفتن، به خوبی ثابت شده است، بهخصوص برخی مطالعات، این تغییرات را در برخی پیکهای توان مکانیکی، از جمله A2S،H1S،H3S،K3S (در این اختصارات منظور از H مفصل ران، K مفصل زانو و A مفصل مچ پا است و منظور از عدد آورده شده شماره پیک و منظور از S صفحه ساجیتال، F صفحه فرونتال و H صفحه هوریزنتال است)، با افزایش در سرعت ترجیحی راه رفتن، مرتبط دانستهاند (6، 7). در این ارتباط، تکزیرا (۶) گزارش کرده است که کار منفی و مثبت گروههای عضلانی که توسط ران، زانو و مچ پا در صفحه ساجیتال در طول راه رفتن ایجاد میشود، با افزایش آهنگ راه رفتن در افراد سالم، بهطور معناداری افزایش مییابد (8). بهطورکلی، حداکثر توان خروجی عضلانی وقتی رخ میدهد که عضلات بهطور کاملاً فعال در سرعت بهینه کوتاه شوند، اگرچه که محدودیتهای آناتومیکی مانند طول بازوی گشتاور، زاویه فیبرهای عضلانی و مداخله تاندونی نیز ممکن است از کوتاهی عضله در سرعت بهینهاش برای ایجاد حرکت جلوگیری کند (9) در نتیجه، توان موجود در مفاصل اندام تحتانی میتواند منعکسکننده فعالیت عضله باشد (6). از سویی نیز، تعامل بین توان عضلانی میتواند نشاندهنده استراتژیهای کنترلی و پیشرانی مشخصی در ارتباط با هر اندام در نظر گرفته شود (10). در ارتباط با گیتهای پاتولوژیک، این تعاملات در نتیجه مکانیزمها و عملکردهای جبرانی مختل میشود (10)؛ بنابراین، فهم ارتباطات توان عضلانی اندام تحتانی مداخله کننده در کنترل و پیشرانی در طول راه رفتن افراد بدون پاتولوژی، در تشخیص عوارض، ناتوانیها و مکانیسمهای جبرانی مفید است (10).
راه رفتن، بهعنوان بخشی از یک برنامه ورزشی نرمال استفاده میشود و توان مکانیکی عضله، یک پارامتر بیومکانیکی مهم در زمان تجزیهوتحلیل عملکرد گیت انسان است، چراکه این پارامتر باعث توصیف جریان انرژیای میگردد که شروعکننده یا کنترلکننده حرکت هر عضو است. در داینامیک معکوس، گشتاور در هر مفصل، توسط ترکیب کینماتیک مفصل سگمنت، مقیاسهای آنتروپومتریکی و نیروهای خارجی محاسبه میگردد. سپس توان عضله میتواند بهعنوان محصول گشتاور مفصل و سرعت زاویهای آن محاسبه شده و یک پیشبینی از جمع فعالیت عضلانی هر مفصل ارائه میدهد. این رویکرد، جهت تعیین غیرمستقیم عملکرد (چه اکسنتریک و چه کانسنتریک) گروههای عضلانی (اکستنسورها یا فلکسورها) که از روی مفصل میگذرند، استفاده میشود (5). تعامل بین توان عضلانی در گیت افراد سالم، پیشرانیهای مشخص و در نتیجه عملکردهای کنترلی مربوط به هر اندام را منعکس میکند (6)، چراکه توان مفصل، مشخصکننده نقش گروههای عضلانی در تولید و کنترل حرکت است (8). مطالعات بسیاری تأثیر توان مکانیکی بر تقارن و عدم تقارن اندام تحتانی را بررسی کردهاند و به تفاوت مقادیر این پارامتر در بین دو اندام پرداخته است (1، 11-13). همچنین برخی مطالعات نوع توان مکانیکی (پیشرانی و کنترلی بودن) در حرکت مفاصل را مورد بررسی و تجزیه تحلیل قرار دادهاند (14-16)، اما تاکنون مطالعهای یافت نشده است که به بررسی و مقایسه توان مکانیکی عضلانی در بین مفاصل مختلف هر اندام علیالخصوص پای برتر بپردازد؛ بنابراین، هدف از پژوهش حاضر مقایسه توان مکانیکی سهبعدی مفاصل پای برتر حین راه رفتن بود.
روش شناسی
تعداد 30 زن سالم با میانگین و انحراف معیار سن 45/ 3± 5/ 29 سال، شاخص توده بدنی 25/3 ± 06/24 کیلوگرم بر مترمربع و سابقه ورزشی 49/5± 96/8 سال در این مطالعه با روش نمونهگیری در دسترس انتخاب و شرکت کردند. جامعه و نمونه آماری در تحقیق حاضر یکسان بود. پروتکل آزمون، مورد تأیید کمیته اخلاق مرکز تحقیقات علوم حرکتی (کد 1000/103) قرار گرفت. تمامی شرکتکنندگان در جریان جزئیات فرآیند آزمون قرار گرفتند و همچنین فرم رضایتنامه آگاهانه شرکت در پژوهش را امضا نمودند. در صورت وجود هرگونه سابقه اختلالات ارتوپدی، عصبی یا جراحی که میتوانست بر الگوی راه رفتن تأثیر بگذارد، افراد از مطالعه حذف شدند. جهت ورود به آزمون تمامی آزمودنیها اندام راست آنها، اندام غالبشان بود. برای تعیین اندام غالب از آزمونهای پرتاب توپ، نوشتن، باز کردن شیشه مربا، ضربه زدن به توپ و پریدن روی یک اندام استفاده شد (11).
دادههای سهبعدی هر دو اندام تحتانی، هنگام راه رفتن آزمودنیها در یک مسیر 10 متری با استفاده از یک سیستم ضبط حرکتی Vicon با ده دوربین (MX-T40-S 120 هرتز) و دو عدد فورس پلیت (کیستلر 50 در 60 سانتیمتر و 50 در 30 سانتیمتری با مدلهای 9260AA3 و 9260AA6 ) جمعآوری شدند و برای شناسایی مفاصل تنه و اندام تحتانی از مدل سهبعدی پلاگ این گیت استفاده شد.
قبل از جمعآوری دادهها، برای آشنایی آزمودنیها با محیط آزمایشگاه و اطمینان از اینکه آنها در وسط مسیر جمعآوری دادهها روی صفحههای نیرو قرار بگیرند، هر آزمودنی چندین بار در مسیر تعیینشده راه رفت. برای هر بار آزمون، از آزمودنیها خواسته شد تا با سرعت انتخابی خود و با پای برهنه راه بروند. هر آزمودنی نیز سه بار مورد آزمایش قرار گرفت و بهمنظور انجام دقیق تجزیهوتحلیل دادهها از تستهایی استفاده شد که در آن تمام مارکرها توسط دوربینها دیده میشد و اندامها بهدرستی بر روی دو فورس پلیت قرار میگرفتند.
برای محاسبات کینماتیک، از مختصات مفاصل ارزیابیشده از طریق نشانگرهای خارجی و تخمین مرکز چرخش مفصل هر آزمودنی استفاده گردید. فیلتر نرمافزار نکسوس (Nexus) (فیلتر Woltring در وضعیت MSE و سطح 10) نیز برای کاهش نویز دوربین و اطلاعات فورس پلیت استفاده شد. در پایان هر مرحله تو-آف، اطلاعات مربوط به پای برتر (راست) افراد از دوربینها استخراج شده و نیروی واکنش زمین مشاهده شده از فورس پلیتها تعیین گردید. بخشهای اندام تحتانی توسط نشانگرهایی که بر روی نشانههای استخوانی قرار داده شده بودند، برای به دست آوردن کینماتیک مفصل ران و زانوی و مچ پای برتر تعیین شدند، تمامی موارد فوق بر اساس استانداردهای ISB و Winter محاسبه گردیدند (5، 17). توان عضلانی لحظهای (P) در هر مفصل (j) و در هر صفحه (k) بهعنوان حاصلضرب ممان مفصل (M) و همچنین سرعت زاویهای آن (ω) با رابطه زیر محاسبه شد (معادله 1) (5، 17):
توان عضلات اسکلتی، امروزه بهعنوان یکی از پارامترهای عضلانی منحصربهفرد و مجزا از قدرت عضلانی شناخته میشود و محصولی از نیروی دینامیکی عضله و سرعت انقباض آن است (1). توان عضله و ارتباط آن با توانایی عملکردی، هم به سرعت انقباض و هم به بزرگی مقاومت به کار گرفته شده وابسته است (2). تحقیقات نشان دادهاند که توان عضله، یک پیشگوی مناسب برای توانایی افراد در کنترل اندام تحتانی بوده، چراکه شامل ترکیبی از اطلاعات کینتیکی و کینماتیکی مفاصل و عضلات است (3، 4) و از طریق مدلهای بیومکانیکی (مانند مدل سگمنتی) و داینامیک معکوس، مشارکت گروههای عضلانی اصلی توسط آن میتواند، محاسبه شود. شبکه توان مفصلی (حاصلضرب گشتاور مفصل و سرعت زاویهای آن) نیز حاکی از تولید انقباض کانسنتریک لحظهای در گروههای عضلانی، همراه با انقباض اکسنتریک در همان عضلات است که در طی حرکاتی مانند راه رفتن جذب میشود. بهعلاوه، یکپارچگی منحنی توان مفصل میتواند برای تعیین مقدار کلی کار انجام شده مورد استفاده قرار گیرد، به صورتی که انقباض کانسنتریک عضله، حاکی از کار مثبت و انقباض اکسنتریک آن حاکی از کار منفی است (5).
در راه رفتن افراد سالم، توان مکانیکی، از جمله فاکتورهای مهمی است که جهت ارزیابی این فعالیت مورد استفاده قرار میگیرد و تغییرات آن، متعاقب تغییرات در راه رفتن، به خوبی ثابت شده است، بهخصوص برخی مطالعات، این تغییرات را در برخی پیکهای توان مکانیکی، از جمله A2S،H1S،H3S،K3S (در این اختصارات منظور از H مفصل ران، K مفصل زانو و A مفصل مچ پا است و منظور از عدد آورده شده شماره پیک و منظور از S صفحه ساجیتال، F صفحه فرونتال و H صفحه هوریزنتال است)، با افزایش در سرعت ترجیحی راه رفتن، مرتبط دانستهاند (6، 7). در این ارتباط، تکزیرا (۶) گزارش کرده است که کار منفی و مثبت گروههای عضلانی که توسط ران، زانو و مچ پا در صفحه ساجیتال در طول راه رفتن ایجاد میشود، با افزایش آهنگ راه رفتن در افراد سالم، بهطور معناداری افزایش مییابد (8). بهطورکلی، حداکثر توان خروجی عضلانی وقتی رخ میدهد که عضلات بهطور کاملاً فعال در سرعت بهینه کوتاه شوند، اگرچه که محدودیتهای آناتومیکی مانند طول بازوی گشتاور، زاویه فیبرهای عضلانی و مداخله تاندونی نیز ممکن است از کوتاهی عضله در سرعت بهینهاش برای ایجاد حرکت جلوگیری کند (9) در نتیجه، توان موجود در مفاصل اندام تحتانی میتواند منعکسکننده فعالیت عضله باشد (6). از سویی نیز، تعامل بین توان عضلانی میتواند نشاندهنده استراتژیهای کنترلی و پیشرانی مشخصی در ارتباط با هر اندام در نظر گرفته شود (10). در ارتباط با گیتهای پاتولوژیک، این تعاملات در نتیجه مکانیزمها و عملکردهای جبرانی مختل میشود (10)؛ بنابراین، فهم ارتباطات توان عضلانی اندام تحتانی مداخله کننده در کنترل و پیشرانی در طول راه رفتن افراد بدون پاتولوژی، در تشخیص عوارض، ناتوانیها و مکانیسمهای جبرانی مفید است (10).
راه رفتن، بهعنوان بخشی از یک برنامه ورزشی نرمال استفاده میشود و توان مکانیکی عضله، یک پارامتر بیومکانیکی مهم در زمان تجزیهوتحلیل عملکرد گیت انسان است، چراکه این پارامتر باعث توصیف جریان انرژیای میگردد که شروعکننده یا کنترلکننده حرکت هر عضو است. در داینامیک معکوس، گشتاور در هر مفصل، توسط ترکیب کینماتیک مفصل سگمنت، مقیاسهای آنتروپومتریکی و نیروهای خارجی محاسبه میگردد. سپس توان عضله میتواند بهعنوان محصول گشتاور مفصل و سرعت زاویهای آن محاسبه شده و یک پیشبینی از جمع فعالیت عضلانی هر مفصل ارائه میدهد. این رویکرد، جهت تعیین غیرمستقیم عملکرد (چه اکسنتریک و چه کانسنتریک) گروههای عضلانی (اکستنسورها یا فلکسورها) که از روی مفصل میگذرند، استفاده میشود (5). تعامل بین توان عضلانی در گیت افراد سالم، پیشرانیهای مشخص و در نتیجه عملکردهای کنترلی مربوط به هر اندام را منعکس میکند (6)، چراکه توان مفصل، مشخصکننده نقش گروههای عضلانی در تولید و کنترل حرکت است (8). مطالعات بسیاری تأثیر توان مکانیکی بر تقارن و عدم تقارن اندام تحتانی را بررسی کردهاند و به تفاوت مقادیر این پارامتر در بین دو اندام پرداخته است (1، 11-13). همچنین برخی مطالعات نوع توان مکانیکی (پیشرانی و کنترلی بودن) در حرکت مفاصل را مورد بررسی و تجزیه تحلیل قرار دادهاند (14-16)، اما تاکنون مطالعهای یافت نشده است که به بررسی و مقایسه توان مکانیکی عضلانی در بین مفاصل مختلف هر اندام علیالخصوص پای برتر بپردازد؛ بنابراین، هدف از پژوهش حاضر مقایسه توان مکانیکی سهبعدی مفاصل پای برتر حین راه رفتن بود.
روش شناسی
تعداد 30 زن سالم با میانگین و انحراف معیار سن 45/ 3± 5/ 29 سال، شاخص توده بدنی 25/3 ± 06/24 کیلوگرم بر مترمربع و سابقه ورزشی 49/5± 96/8 سال در این مطالعه با روش نمونهگیری در دسترس انتخاب و شرکت کردند. جامعه و نمونه آماری در تحقیق حاضر یکسان بود. پروتکل آزمون، مورد تأیید کمیته اخلاق مرکز تحقیقات علوم حرکتی (کد 1000/103) قرار گرفت. تمامی شرکتکنندگان در جریان جزئیات فرآیند آزمون قرار گرفتند و همچنین فرم رضایتنامه آگاهانه شرکت در پژوهش را امضا نمودند. در صورت وجود هرگونه سابقه اختلالات ارتوپدی، عصبی یا جراحی که میتوانست بر الگوی راه رفتن تأثیر بگذارد، افراد از مطالعه حذف شدند. جهت ورود به آزمون تمامی آزمودنیها اندام راست آنها، اندام غالبشان بود. برای تعیین اندام غالب از آزمونهای پرتاب توپ، نوشتن، باز کردن شیشه مربا، ضربه زدن به توپ و پریدن روی یک اندام استفاده شد (11).
دادههای سهبعدی هر دو اندام تحتانی، هنگام راه رفتن آزمودنیها در یک مسیر 10 متری با استفاده از یک سیستم ضبط حرکتی Vicon با ده دوربین (MX-T40-S 120 هرتز) و دو عدد فورس پلیت (کیستلر 50 در 60 سانتیمتر و 50 در 30 سانتیمتری با مدلهای 9260AA3 و 9260AA6 ) جمعآوری شدند و برای شناسایی مفاصل تنه و اندام تحتانی از مدل سهبعدی پلاگ این گیت استفاده شد.
قبل از جمعآوری دادهها، برای آشنایی آزمودنیها با محیط آزمایشگاه و اطمینان از اینکه آنها در وسط مسیر جمعآوری دادهها روی صفحههای نیرو قرار بگیرند، هر آزمودنی چندین بار در مسیر تعیینشده راه رفت. برای هر بار آزمون، از آزمودنیها خواسته شد تا با سرعت انتخابی خود و با پای برهنه راه بروند. هر آزمودنی نیز سه بار مورد آزمایش قرار گرفت و بهمنظور انجام دقیق تجزیهوتحلیل دادهها از تستهایی استفاده شد که در آن تمام مارکرها توسط دوربینها دیده میشد و اندامها بهدرستی بر روی دو فورس پلیت قرار میگرفتند.
برای محاسبات کینماتیک، از مختصات مفاصل ارزیابیشده از طریق نشانگرهای خارجی و تخمین مرکز چرخش مفصل هر آزمودنی استفاده گردید. فیلتر نرمافزار نکسوس (Nexus) (فیلتر Woltring در وضعیت MSE و سطح 10) نیز برای کاهش نویز دوربین و اطلاعات فورس پلیت استفاده شد. در پایان هر مرحله تو-آف، اطلاعات مربوط به پای برتر (راست) افراد از دوربینها استخراج شده و نیروی واکنش زمین مشاهده شده از فورس پلیتها تعیین گردید. بخشهای اندام تحتانی توسط نشانگرهایی که بر روی نشانههای استخوانی قرار داده شده بودند، برای به دست آوردن کینماتیک مفصل ران و زانوی و مچ پای برتر تعیین شدند، تمامی موارد فوق بر اساس استانداردهای ISB و Winter محاسبه گردیدند (5، 17). توان عضلانی لحظهای (P) در هر مفصل (j) و در هر صفحه (k) بهعنوان حاصلضرب ممان مفصل (M) و همچنین سرعت زاویهای آن (ω) با رابطه زیر محاسبه شد (معادله 1) (5، 17):
Pj,k = Mj,k. ωj,k معادله 1
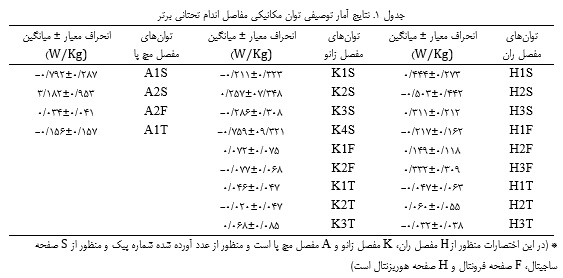
در این اختصارات منظور از H مفصل ران، K مفصل زانو و A مفصل مچ پا است. منظور از عدد آورده شده شماره پیک و منظور از S صفحه ساجیتال، F صفحه فرونتال و H صفحه هوریزنتال است.
برای انجام تحلیلهای آماری از نرمافزار SPSS مدل ۲۲ استفاده گردید. برای آزمون توصیفی، از میانگین و انحراف معیار و برای بررسی نرمال بودن توزیع دادهها از آزمون شاپیروویلک استفاده شد. همچنین از آزمون تحلیل واریانس یکراهه (آنووا) و آزمون تعقیبی بونفرونی برای مقایسه مقادیر متغیرهای توان عضلانی مکانیکی اندام برتر در سطح معنیداری 05/0 P≤ استفاده گردید.
نتایج
نتایج حاصل از آزمون آمار توصیفی در جدول 1 آورده شده است. همانطور که مشخص میباشد بیشترین میانگین توان مکانیکی در اندام برتر حین راه رفتن مربوط به مفصل مچ پا در پیک دوم ساجیتال A2S (در این اختصارات منظور از H مفصل ران، K مفصل زانو و A مفصل مچ پا است و منظور از عدد آورده شده شماره پیک و منظور از S صفحه ساجیتال، F صفحه فرونتال و H صفحه هوریزنتال است) و کمترین میزان برای مفصل زانو در پیک دوم هوریزنتال K2T میباشد.
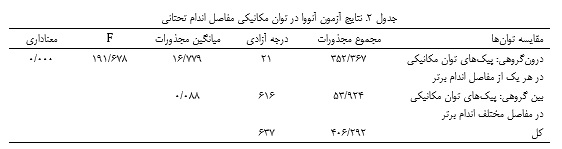
نتایج آزمون شاپیروویک حاکی از نرمال بودن توزیع دادهها بود. همچنین نتایج حاصل از آزمون استنباطی آنووا نشاندهنده وجود تفاوت معنادار در میانگینهای مربوط به توان مکانیکی مفاصل اندام تحتانی بود (جدول 2).
در ارتباط با نتایج مربوط به تست تعقیبی، اینگونه نشان داده شد که:
بین H1S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H3S، H3F و K2S ارتباط معناداری دیده شد. بین H2S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K3S و K4S ارتباط معناداری دیده شد. بین H3S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H2F، H3F، H2T، K2S، K1F، K1T، K3T و A2F ارتباط معناداری دیده شد. بین H1F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H1T، H2T، H3T، K1S، K3S، K2F، K1T، K2T، A2F و A1T ارتباط معناداری دیده شد. بین H2F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H3F، H1T، H2T، H3T، K2S، K1F، K2F، K1T، K2T، K3T و A2F ارتباط معناداری دیده شد. بین H3F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H2T، K2S، K1F و K3T ارتباط معناداری دیده شد. بین H1T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H2T، H3T، K1S، K3S، K1F، K2F، K1T، K2T، K3T، A2F و A1T ارتباط معناداری دیده شد. بین H2T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H3T، K1S، K2S، K1F، K2F، K1T، K2T، K3T، A2F و A1T ارتباط معناداری دیده شد. بین H3T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K1S، K3S، K1F، K2F، K1T، K2T، K3T، A2F و A1T تفاوت معناداری دیده شد.
بین K1S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K3S، K2F، K1T، K2T، K3T، A2F و A1T تفاوت معناداری دیده شد. بین K2S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K1F، K1T، K2T، K3T و A2F تفاوت معناداری دیده شد. بین K3S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K2F، K2T و A1T ارتباط معناداری دیده شد. بین K4S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز A1S ارتباط معناداری دیده شد. بین K1F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K2F، K1T، K2T، K3T، A2F و A1T ارتباط معناداری دیده شد. بین K2F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K1T، K2T، K3T، A2F و A1T ارتباط معناداری دیده شد. بین K1T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K2T، K3T، A2F و A1T ارتباط معناداری دیده شد. بین K2T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K3T، A2F و A1T ارتباط معناداری دیده شد. بین K3T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز A2F و A1T ارتباط معناداری دیده شد. بین A1S و سایر پیکهای مربوط به توان مکانیکی پای غالب ارتباط معناداری دیده شد. بین A2S و سایر پیکهای مربوط به توان مکانیکی پای غالب ارتباط معناداری دیده شد. بین A2F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز A1T ارتباط معناداری دیده شد.
بحث
هدف از تحقیق حاضر بررسی و مقایسه توان مکانیکی سهبعدی مفاصل اندام تحتانی برتر در زنان جوان حین راه رفتن بود. همانطور که از نتایج مشخص شده است، در میان پیکهای توان مکانیکی اندام تحتانی غالب، بیشترین پیک متعلق به A2S و کمترین متعلق به K2T میباشد. همچنین بین میانگین برخی از پارامترها مانند H1S بیشترین تفاوت معنادار با سایر پیکها مشاهده شده است و بین میانگینهای H2F و H1T و سایر پیکهای توان مکانیکی کمترین تفاوت میانگین دیده شده است.
همانطور که ذکر شد دومین پیک مفصل مچ پا در صفحه ساجیتال، بیشترین و دومین پیک مفصل زانو در صفحه عرضی کمترین میانگین توان مکانیکی را در اندام تحتانی غالب به خود اختصاص داده است. این یافتهها با نتایج صادقی و همکاران و زلیک و همکاران (18، 19) همخوانی دارد. مفصل مچ پا یکی از اجزای اصلی جهت پیشرانی روبهجلو محسوب میشود (19) و با ایجاد پلنتار فلکشن زیاد در مرحله پوش آف بهعنوان یک مداخله بزرگ برای حرکت به جلو است (20) و ازآنجاکه حرکت راه رفتن در این تحقیق به سمت جلو بوده و پیشرانی A2S با ایجاد پلنتار فلکشن در صفحه ساجیتال رخ میدهد، این پیک بیشترین مقدار را به خود اختصاص داده است.
در ران در صفحه ساجیتال بین میانگین پیکهای H1S و H2S و اکثر سایر پیکهای توان مکانیکی ارتباط معناداری وجود دارد، اما این امر در ارتباط با H3S صادق نمیباشد و بین میانگین پیک توان این متغیر و پیکهای ران در صفحات فرونتال، عرضی، زانو در صفحات فرونتال و عرضی و نیز مچ پا در صفحه عرضی ارتباط معناداری وجود ندارد. این نتایج با یافتههای وینتر و همکاران و سائز و همکاران (9، 21) همخوانی دارد. ازآنجاکه H1S و H2S با کنترل تنه و افتادگی در استنس ارتباط داشته و با سبب فعالسازی ران میشوند با بیشتر میانگینهای اندام تحتانی مرتبطاند، اما H3S ازآنجاکه در پوش آف رخ میدهد و نشاندهنده این است که تولیدی بوده و عملکرد پیشرانی دارد، در انتهای فاز استنس ایجاد شده و به عبارتی پا را به جلو هل میدهد و با ایجاد انقباض کانسنتریک این کار را تقویت میکند، درنتیجه بهصورت مستقلتر از سایر پیکها عمل مینماید. در ران در صفحه فرونتال بین میانگین پیک توان مکانیکی در H1F و H2F با پیکهای زانو، مچ پا و صفحه عرضی ران تفاوت معناداری دیده نشد، اما در مورد H3F بهجز زانو و یکی از پیکهای صفحه عرضی ران، سایر توان ها با هم اختلاف معناداری نشان دادند. این یافتهها با پژوهش قبلی صادقی و همکاران (6) همخوانی دارد. در حقیقت، در صفحه فرونتال با ابداکشن و اداکشن مفصل ران که مهمترین عامل ثبات و حفظ دینامیک آن در طول حمایت یکطرفه است، این فازها اتفاق میافتند. در هیل استرایک نیز ران با پیکهایش در صفحه فرونتال در کنترل تنه به جلو دخیل است، سبب پیشرانی به جلو شده، چرخش تنه را باعث میشود و لگن را در سمت مقابل کنترل میکند (22) تا بدن وارد فاز سوئینگ شود، بنابراین کمترین تعامل را با زانو خواهد داشت. در ران در صفحه عرضی بین H1T، H2T، H3T و سایر پیکهای زانو و مچ پا تفاوت معناداری دیده نشده است. بهطورکلی چرخش لگن که ساندرز و همکاران (23) آن را یکی از شش مشخصه گیت میدانند بیشتر با حرکات ران در صفحه ساجیتال مرتبط بوده و همپوشانی دارد. خصوصاً باید توجه داشت که چرخش خارجی لگن که در نیمه دوم میداستنس اتفاق میافتد سبب به جلو راندن ران شده و به پیشرانی اندام تختانی و تنه کمک میکند (10). این نتایج با مطالعات گذشته مانند صادقی و همکاران (10) همخوانی دارد.
در زانو در صفحه ساجیتال، بهجز پیک K1S، سه پیک دیگر (K2S، K3S و K4S) توان مکانیکی در زانو، تفاوت معناداری را با سایر پیکهای توان مکانیکی اندام تحتانی برتر نشان دادند. K1S معمولاً کمی بعد از هیل کانتکت اتفاق میافتد، اما K2S مسئول ثبات دهی اندام بعد از پذیرش وزن است که به دنبال قبول وزن K3S رخ داده و در انتهای سوئینگ نیز K4S را خواهیم داشت. نتایج این تحقیق با نتایج مطالعه وینتر (9) که میگویند همراه با اکستنشن زانو، پس از یک فلکشن کنترل شده در طول میداستنس این پیک را مشاهده میکنیم همسو است. در حقیقت اکستنسورهای زانو خصوصاً در پیک توان مکانیکی K2S میتوانند یک پیشران محسوب شده و اندام را برای پوش آف آماده نمایند. در صفحه فرونتال، پیکهای زانو، با اکثر پیکهای توان مکانیکی اندام تحتانی معنادار نیستند. ازآنجاکه زانو در صفحه فرونتال از خود ابداکشن و اداکشن نشان میدهد و میزان آن در راه رفتن حداقل است، این نتایج با نتایج مطالعات قبلی همسو میباشد (2، 21). در زانو در صفحه عرضی، همپوشانی و ارتباط معنادار زیادی با سایر پیکها دید میشود، در حقیقت K1T که کمی بعد از هیل استرایک روی میدهد سبب تولید توان به علت فعالیتهای پایین فلکسورها برای این علت است که زانو بتواند در موقعیتهای جذب نیروی برخوردی بیشترین توان را دارا باشد. همچنین K2T در مرحله چرخش کامل زانو رخ میدهد که پس از برخورد پا با زمین، زانو به داخل میچرخد و به پیشرانی انتقال وزن بدن، تحت کنترل ممان چرخشی خارجی کمک میکند (11)؛ اما K3T در حدود 55 درصدی سیکل گیت اتفاق افتاده و چون چرخش داخلی ران در طول پوش آف هنگام حرکت مرکز جرم به سمت عضو مقابل رخ میدهد، توان مکانیکی هر دو پا را یکسان میکند.
در مچ پا در صفحات ساجیتال، فرونتال و هوریزنتال که بیشترین معناداری را با سایر پیکهای توان مکانیکی پای برتر نشان داده است باید اذعان داشت که این مفصل بهطورکلی نقش پیشرانی کمی در گیت داشته و کنترل نقش اصلی آن است و بنابراین بیشترین تعامل را جهت پیشرانی و کنترل سایر مفاصل نشان میدهد. این نتایج با مطالعات قبلی در این زمینه (18، 19) همسو بوده و باید توجه داشت که بهطور خاص در A2S که شامل پلنتار فلکشن مچ پا میشود و در پوش آف اتفاق میافتد بهعنوان یک مداخله بزرگ در اندام جهت به جلو رفتن فرد میشود (19).
نتیجه گیری نهایی
با توجه به نتایج پژوهش حاضر شاید بتوان نتیجه گرفت که بین پیکهای توان مکانیکی مفاصل ران، زانو و مچ پای اندام تحتانی برتر تفاوت وجود داشته و در بین این پیکها، دومین پیک مچ پا و زانو به ترتیب بیشترین و کمترین میزان توان مکانیکی را به خود اختصاص میدهند؛ بنابراین متخصصان بیومکانیک، توانبخشی و گروههای درمانی باید مدنظر داشته باشند که در بررسی تحلیل راه رفتن و نیز تقویت عضلات و توان اندام تحتانی در فعالیت راه رفتن، مفصل مچ پا بیشترین اهمیت را در پیشرانی به عهده دارد و باید مورد توجه قرار بگیرد و نقش زانو بیشتر ثبات دهنده و کنترلی میباشد.
تشکر و قدردانی
بدینوسیله از تمام افرادی که در انجام این پژوهش به ما یاری رساندند تقدیر و تشکر مینماییم. مطالعه فوق (با کد 1000/103) مورد تأیید کمیته اخلاق مرکز تحقیقات علوم حرکتی قرار گرفته است.
ملاحظات اخلاقی
پیروی از اصول اخلاق پژوهش
تمامی مراحل پروتکل این تحقیق، مورد تأیید کمیته اخلاق مرکز تحقیقات علوم حرکتی دانشگاه خوارزمی (کد 1000/103) قرار گرفت. همچنین تمامی شرکتکنندگان در جریان جزئیات فرآیند آزمون قرار گرفته و فرم رضایتنامه آگاهانه شرکت در پژوهش را امضا نمودند.
حامی مالی
این پژوهش هیچگونه کمک مالی از سازمان های دولتی، خصوصی و غیرانتفاعی دریافت نکرده است.
مشارکت نویسندگان
تمام نویسندگان در طراحی، اجرا و نگارش همه بخش های پژوهش حاضر مشارکت داشته اند.
تعارض
بنابر اظهار نویسندگان، این مقاله تعارض منافع ندارد.
برای انجام تحلیلهای آماری از نرمافزار SPSS مدل ۲۲ استفاده گردید. برای آزمون توصیفی، از میانگین و انحراف معیار و برای بررسی نرمال بودن توزیع دادهها از آزمون شاپیروویلک استفاده شد. همچنین از آزمون تحلیل واریانس یکراهه (آنووا) و آزمون تعقیبی بونفرونی برای مقایسه مقادیر متغیرهای توان عضلانی مکانیکی اندام برتر در سطح معنیداری 05/0 P≤ استفاده گردید.
نتایج
نتایج حاصل از آزمون آمار توصیفی در جدول 1 آورده شده است. همانطور که مشخص میباشد بیشترین میانگین توان مکانیکی در اندام برتر حین راه رفتن مربوط به مفصل مچ پا در پیک دوم ساجیتال A2S (در این اختصارات منظور از H مفصل ران، K مفصل زانو و A مفصل مچ پا است و منظور از عدد آورده شده شماره پیک و منظور از S صفحه ساجیتال، F صفحه فرونتال و H صفحه هوریزنتال است) و کمترین میزان برای مفصل زانو در پیک دوم هوریزنتال K2T میباشد.
نتایج آزمون شاپیروویک حاکی از نرمال بودن توزیع دادهها بود. همچنین نتایج حاصل از آزمون استنباطی آنووا نشاندهنده وجود تفاوت معنادار در میانگینهای مربوط به توان مکانیکی مفاصل اندام تحتانی بود (جدول 2).
در ارتباط با نتایج مربوط به تست تعقیبی، اینگونه نشان داده شد که:
بین H1S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H3S، H3F و K2S ارتباط معناداری دیده شد. بین H2S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K3S و K4S ارتباط معناداری دیده شد. بین H3S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H2F، H3F، H2T، K2S، K1F، K1T، K3T و A2F ارتباط معناداری دیده شد. بین H1F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H1T، H2T، H3T، K1S، K3S، K2F، K1T، K2T، A2F و A1T ارتباط معناداری دیده شد. بین H2F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H3F، H1T، H2T، H3T، K2S، K1F، K2F، K1T، K2T، K3T و A2F ارتباط معناداری دیده شد. بین H3F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H2T، K2S، K1F و K3T ارتباط معناداری دیده شد. بین H1T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H2T، H3T، K1S، K3S، K1F، K2F، K1T، K2T، K3T، A2F و A1T ارتباط معناداری دیده شد. بین H2T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز H3T، K1S، K2S، K1F، K2F، K1T، K2T، K3T، A2F و A1T ارتباط معناداری دیده شد. بین H3T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K1S، K3S، K1F، K2F، K1T، K2T، K3T، A2F و A1T تفاوت معناداری دیده شد.
بین K1S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K3S، K2F، K1T، K2T، K3T، A2F و A1T تفاوت معناداری دیده شد. بین K2S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K1F، K1T، K2T، K3T و A2F تفاوت معناداری دیده شد. بین K3S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K2F، K2T و A1T ارتباط معناداری دیده شد. بین K4S و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز A1S ارتباط معناداری دیده شد. بین K1F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K2F، K1T، K2T، K3T، A2F و A1T ارتباط معناداری دیده شد. بین K2F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K1T، K2T، K3T، A2F و A1T ارتباط معناداری دیده شد. بین K1T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K2T، K3T، A2F و A1T ارتباط معناداری دیده شد. بین K2T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز K3T، A2F و A1T ارتباط معناداری دیده شد. بین K3T و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز A2F و A1T ارتباط معناداری دیده شد. بین A1S و سایر پیکهای مربوط به توان مکانیکی پای غالب ارتباط معناداری دیده شد. بین A2S و سایر پیکهای مربوط به توان مکانیکی پای غالب ارتباط معناداری دیده شد. بین A2F و سایر پیکهای مربوط به توان مکانیکی پای غالب بهجز A1T ارتباط معناداری دیده شد.
بحث
هدف از تحقیق حاضر بررسی و مقایسه توان مکانیکی سهبعدی مفاصل اندام تحتانی برتر در زنان جوان حین راه رفتن بود. همانطور که از نتایج مشخص شده است، در میان پیکهای توان مکانیکی اندام تحتانی غالب، بیشترین پیک متعلق به A2S و کمترین متعلق به K2T میباشد. همچنین بین میانگین برخی از پارامترها مانند H1S بیشترین تفاوت معنادار با سایر پیکها مشاهده شده است و بین میانگینهای H2F و H1T و سایر پیکهای توان مکانیکی کمترین تفاوت میانگین دیده شده است.
همانطور که ذکر شد دومین پیک مفصل مچ پا در صفحه ساجیتال، بیشترین و دومین پیک مفصل زانو در صفحه عرضی کمترین میانگین توان مکانیکی را در اندام تحتانی غالب به خود اختصاص داده است. این یافتهها با نتایج صادقی و همکاران و زلیک و همکاران (18، 19) همخوانی دارد. مفصل مچ پا یکی از اجزای اصلی جهت پیشرانی روبهجلو محسوب میشود (19) و با ایجاد پلنتار فلکشن زیاد در مرحله پوش آف بهعنوان یک مداخله بزرگ برای حرکت به جلو است (20) و ازآنجاکه حرکت راه رفتن در این تحقیق به سمت جلو بوده و پیشرانی A2S با ایجاد پلنتار فلکشن در صفحه ساجیتال رخ میدهد، این پیک بیشترین مقدار را به خود اختصاص داده است.
در ران در صفحه ساجیتال بین میانگین پیکهای H1S و H2S و اکثر سایر پیکهای توان مکانیکی ارتباط معناداری وجود دارد، اما این امر در ارتباط با H3S صادق نمیباشد و بین میانگین پیک توان این متغیر و پیکهای ران در صفحات فرونتال، عرضی، زانو در صفحات فرونتال و عرضی و نیز مچ پا در صفحه عرضی ارتباط معناداری وجود ندارد. این نتایج با یافتههای وینتر و همکاران و سائز و همکاران (9، 21) همخوانی دارد. ازآنجاکه H1S و H2S با کنترل تنه و افتادگی در استنس ارتباط داشته و با سبب فعالسازی ران میشوند با بیشتر میانگینهای اندام تحتانی مرتبطاند، اما H3S ازآنجاکه در پوش آف رخ میدهد و نشاندهنده این است که تولیدی بوده و عملکرد پیشرانی دارد، در انتهای فاز استنس ایجاد شده و به عبارتی پا را به جلو هل میدهد و با ایجاد انقباض کانسنتریک این کار را تقویت میکند، درنتیجه بهصورت مستقلتر از سایر پیکها عمل مینماید. در ران در صفحه فرونتال بین میانگین پیک توان مکانیکی در H1F و H2F با پیکهای زانو، مچ پا و صفحه عرضی ران تفاوت معناداری دیده نشد، اما در مورد H3F بهجز زانو و یکی از پیکهای صفحه عرضی ران، سایر توان ها با هم اختلاف معناداری نشان دادند. این یافتهها با پژوهش قبلی صادقی و همکاران (6) همخوانی دارد. در حقیقت، در صفحه فرونتال با ابداکشن و اداکشن مفصل ران که مهمترین عامل ثبات و حفظ دینامیک آن در طول حمایت یکطرفه است، این فازها اتفاق میافتند. در هیل استرایک نیز ران با پیکهایش در صفحه فرونتال در کنترل تنه به جلو دخیل است، سبب پیشرانی به جلو شده، چرخش تنه را باعث میشود و لگن را در سمت مقابل کنترل میکند (22) تا بدن وارد فاز سوئینگ شود، بنابراین کمترین تعامل را با زانو خواهد داشت. در ران در صفحه عرضی بین H1T، H2T، H3T و سایر پیکهای زانو و مچ پا تفاوت معناداری دیده نشده است. بهطورکلی چرخش لگن که ساندرز و همکاران (23) آن را یکی از شش مشخصه گیت میدانند بیشتر با حرکات ران در صفحه ساجیتال مرتبط بوده و همپوشانی دارد. خصوصاً باید توجه داشت که چرخش خارجی لگن که در نیمه دوم میداستنس اتفاق میافتد سبب به جلو راندن ران شده و به پیشرانی اندام تختانی و تنه کمک میکند (10). این نتایج با مطالعات گذشته مانند صادقی و همکاران (10) همخوانی دارد.
در زانو در صفحه ساجیتال، بهجز پیک K1S، سه پیک دیگر (K2S، K3S و K4S) توان مکانیکی در زانو، تفاوت معناداری را با سایر پیکهای توان مکانیکی اندام تحتانی برتر نشان دادند. K1S معمولاً کمی بعد از هیل کانتکت اتفاق میافتد، اما K2S مسئول ثبات دهی اندام بعد از پذیرش وزن است که به دنبال قبول وزن K3S رخ داده و در انتهای سوئینگ نیز K4S را خواهیم داشت. نتایج این تحقیق با نتایج مطالعه وینتر (9) که میگویند همراه با اکستنشن زانو، پس از یک فلکشن کنترل شده در طول میداستنس این پیک را مشاهده میکنیم همسو است. در حقیقت اکستنسورهای زانو خصوصاً در پیک توان مکانیکی K2S میتوانند یک پیشران محسوب شده و اندام را برای پوش آف آماده نمایند. در صفحه فرونتال، پیکهای زانو، با اکثر پیکهای توان مکانیکی اندام تحتانی معنادار نیستند. ازآنجاکه زانو در صفحه فرونتال از خود ابداکشن و اداکشن نشان میدهد و میزان آن در راه رفتن حداقل است، این نتایج با نتایج مطالعات قبلی همسو میباشد (2، 21). در زانو در صفحه عرضی، همپوشانی و ارتباط معنادار زیادی با سایر پیکها دید میشود، در حقیقت K1T که کمی بعد از هیل استرایک روی میدهد سبب تولید توان به علت فعالیتهای پایین فلکسورها برای این علت است که زانو بتواند در موقعیتهای جذب نیروی برخوردی بیشترین توان را دارا باشد. همچنین K2T در مرحله چرخش کامل زانو رخ میدهد که پس از برخورد پا با زمین، زانو به داخل میچرخد و به پیشرانی انتقال وزن بدن، تحت کنترل ممان چرخشی خارجی کمک میکند (11)؛ اما K3T در حدود 55 درصدی سیکل گیت اتفاق افتاده و چون چرخش داخلی ران در طول پوش آف هنگام حرکت مرکز جرم به سمت عضو مقابل رخ میدهد، توان مکانیکی هر دو پا را یکسان میکند.
در مچ پا در صفحات ساجیتال، فرونتال و هوریزنتال که بیشترین معناداری را با سایر پیکهای توان مکانیکی پای برتر نشان داده است باید اذعان داشت که این مفصل بهطورکلی نقش پیشرانی کمی در گیت داشته و کنترل نقش اصلی آن است و بنابراین بیشترین تعامل را جهت پیشرانی و کنترل سایر مفاصل نشان میدهد. این نتایج با مطالعات قبلی در این زمینه (18، 19) همسو بوده و باید توجه داشت که بهطور خاص در A2S که شامل پلنتار فلکشن مچ پا میشود و در پوش آف اتفاق میافتد بهعنوان یک مداخله بزرگ در اندام جهت به جلو رفتن فرد میشود (19).
نتیجه گیری نهایی
با توجه به نتایج پژوهش حاضر شاید بتوان نتیجه گرفت که بین پیکهای توان مکانیکی مفاصل ران، زانو و مچ پای اندام تحتانی برتر تفاوت وجود داشته و در بین این پیکها، دومین پیک مچ پا و زانو به ترتیب بیشترین و کمترین میزان توان مکانیکی را به خود اختصاص میدهند؛ بنابراین متخصصان بیومکانیک، توانبخشی و گروههای درمانی باید مدنظر داشته باشند که در بررسی تحلیل راه رفتن و نیز تقویت عضلات و توان اندام تحتانی در فعالیت راه رفتن، مفصل مچ پا بیشترین اهمیت را در پیشرانی به عهده دارد و باید مورد توجه قرار بگیرد و نقش زانو بیشتر ثبات دهنده و کنترلی میباشد.
تشکر و قدردانی
بدینوسیله از تمام افرادی که در انجام این پژوهش به ما یاری رساندند تقدیر و تشکر مینماییم. مطالعه فوق (با کد 1000/103) مورد تأیید کمیته اخلاق مرکز تحقیقات علوم حرکتی قرار گرفته است.
ملاحظات اخلاقی
پیروی از اصول اخلاق پژوهش
تمامی مراحل پروتکل این تحقیق، مورد تأیید کمیته اخلاق مرکز تحقیقات علوم حرکتی دانشگاه خوارزمی (کد 1000/103) قرار گرفت. همچنین تمامی شرکتکنندگان در جریان جزئیات فرآیند آزمون قرار گرفته و فرم رضایتنامه آگاهانه شرکت در پژوهش را امضا نمودند.
حامی مالی
این پژوهش هیچگونه کمک مالی از سازمان های دولتی، خصوصی و غیرانتفاعی دریافت نکرده است.
مشارکت نویسندگان
تمام نویسندگان در طراحی، اجرا و نگارش همه بخش های پژوهش حاضر مشارکت داشته اند.
تعارض
بنابر اظهار نویسندگان، این مقاله تعارض منافع ندارد.
فهرست منابع
1. Sadeghi H, Allard P, Duhaime M. Functional gait asymmetry in able-bodied subjects. Human movement science. 1997;16(2-3):243-58. [DOI:10.1016/S0167-9457(96)00054-1]
2. Valtonen AM, Pöyhönen T, Manninen M, Heinonen A, Sipilä S. Knee extensor and flexor muscle power explains stair ascension time in patients with unilateral late-stage knee osteoarthritis: a cross-sectional study. Archives of physical medicine and rehabilitation. 2015;96(2):253-9. [DOI:10.1016/j.apmr.2014.09.011] [PMID]
3. Sadeghi H, Prince F, Zabjek KF, Allard P. Sagittal-hip-muscle power during walking in old and young able-bodied men. Journal of Aging and Physical Activity. 2001;9(2):172-83. [DOI:10.1123/japa.9.2.172]
4. Molla RY. The Effect of Dominant and Non-dominant Upper Limb Splinting on 3-D Mechanical Muscle Power of Ankle Joint During Walking. Middle East Journal of Rehabilitation and Health Studies. 2024 (In Press).
5. Winter DA. Biomechanics and motor control of human movement: John Wiley & Sons; 2009. [DOI:10.1002/9780470549148]
6. Sadeghi H, Sadeghi S, Allard P, Labelle H, Duhaime M. Lower limb muscle power relationships in bilateral able-bodied gait. American journal of physical medicine & rehabilitation. 2001;80(11):821-30. [DOI:10.1097/00002060-200111000-00006] [PMID]
7. Yousefian Molla R, Sadeghi H. Effect of Changes of Upper Extremity Pattern Movements on Biomechanical Variables of Gait: A Systematic Review. The Scientific Journal of Rehabilitation Medicine. 2020;9(2):298-310.
8. Teixeira-Salmela LF, Nadeau S, Milot M-H, Gravel D, Requião LF. Effects of cadence on energy generation and absorption at lower extremity joints during gait. Clinical biomechanics. 2008;23(6):769-78. [DOI:10.1016/j.clinbiomech.2008.02.007] [PMID]
9. Winter D. A review of kinematic parameters in human walking. Gait analysis: theory and application. 1995.
10. Sadeghi H, Allard P, Duhaime M. Contributions of lower-limb muscle power in gait of people without impairments. Physical Therapy. 2000;80(12):1188-96. [DOI:10.1093/ptj/80.12.1188] [PMID]
11. Sadeghi H, Allard P, Prince F, Labelle H. Symmetry and limb dominance in able-bodied gait: a review. Gait & posture. 2000;12(1):34-45. [DOI:10.1016/S0966-6362(00)00070-9] [PMID]
12. Hannah R, Morrison J, Chapman A. Kinematic symmetry of the lower limbs. Archives of physical medicine and rehabilitation. 1984;65(4):155-8.
13. Yousefian Molla R, Sadeghi H, Kiani A. Symmetry or Asymmetry of Lower Limb 3D-Mechanical Muscle Power in Female Athletes' Gait. Journal of Advanced Sport Technology. 2023;7(2):12-22.
14. Bogey RA, Barnes LA. Estimates of individual muscle power production in normal adult walking. Journal of neuroengineering and rehabilitation. 2017;14(1):1-10. [DOI:10.1186/s12984-017-0306-2] [PMID]
15. Fukuda Y, Masani K, Yamaguchi T. Comparison of lower limb joint moment and power during turning gait between young and old adults using hierarchical Bayesian inference. Journal of Biomechanics. 2020;103:109702. [DOI:10.1016/j.jbiomech.2020.109702] [PMID]
16. Kostka J, Niwald M, Guligowska A, Kostka T, Miller E. Muscle power, contraction velocity and functional performance after stroke. Brain and behavior. 2019;9(4):e01243. [DOI:10.1002/brb3.1243] [PMID]
17. Robertson DGE, Caldwell GE, Hamill J, Kamen G, Whittlesey S. Research methods in biomechanics: Human kinetics; 2013. [DOI:10.5040/9781492595809]
18. Zelik KE, Honert EC. Ankle and foot power in gait analysis: Implications for science, technology and clinical assessment. Journal of Biomechanics. 2018;75:1-12. [DOI:10.1016/j.jbiomech.2018.04.017] [PMID]
19. Sadeghi H, Allard P, Lachance R, Aissaoui R, Sadeghi S, Perrault R, et al. Relationship between ankle frontal muscle powers and three-D gait patterns. American journal of physical medicine & rehabilitation. 2002;81(6):429-36. [DOI:10.1097/00002060-200206000-00007] [PMID]
20. Sadeghi H, Allard P, Duhaime M. Muscle power compensatory mechanisms in below-knee amputee gait. American journal of physical medicine & rehabilitation. 2001;80(1):25-32. [DOI:10.1097/00002060-200101000-00007] [PMID]
21. Saez de Asteasu ML, Martínez‐Velilla N, Zambom‐Ferraresi F, Ramírez‐Vélez R, García‐Hermoso A, Cadore EL, et al. Changes in muscle power after usual care or early structured exercise intervention in acutely hospitalized older adults. Journal of cachexia, sarcopenia and muscle. 2020;11(4):997-1006. [DOI:10.1002/jcsm.12564] [PMID]
22. Plotnik M, Wagner JM, Adusumilli G, Gottlieb A, Naismith RT. Gait asymmetry, and bilateral coordination of gait during a six-minute walk test in persons with multiple sclerosis. Scientific reports. 2020;10(1):1-11. [DOI:10.1038/s41598-020-68263-0] [PMID]
23. Saunders DR. Components of biological motion perception: Queen's University; 2011.
| بازنشر اطلاعات | |
 |
این مقاله تحت شرایط Creative Commons Attribution-NonCommercial 4.0 International License قابل بازنشر است. |

تماس با ما
فصلنامه بیومکانیک ورزشی
همدان،شهرک مدنی، بلوار امام خمینی(ره)، بلوار پروفسور موسیوند، مجتمع دانشگاه آزاد اسلامی واحد همدان، معاونت پژوهش و فناوری، دفتر مجلات علمی
صندوق پستی: 734
تلفن دفتر نشریه: 08134494042
وبسایت: http://biomechanics.iauh.ac.ir
ایمیل: sportbiomechanics@iauh.ac.ir